 M. Bindhammer
M. Bindhammer1. Introduction
After stumbling across the 2024 Business Card Contest, I thought a little robot that avoids obstacles would be a nice entry. It is no problem to keep the length and width of a business card, the height of 1 to 2 mm is of course impossible for a robot to keep, but with a height of 10 to 20 mm, one can work well. The main body of the robot is a PCB that features a microcontroller, a motor driver, and a LiPo battery charger. I chose the ATMEGA32U4 because it does not require a USB to serial chip. The time of flight sensor VL53L1X alternatively VL53L0X (breakout board) is used as the “eye” or “head” of the robot.

Schematic of the business card robot

N20 geared motors, wheels, and VL53L1X breakout board. The wheels are normally intended for small RC airplanes. The tires are a bit squishy and have a lot of grip, perfect for a small robot
2. Design

Top view of the PCB (90 x 50 mm)

Bottom view of the PCB

3D drawing of the motor mount and the ball caster



 Carl Bugeja
Carl Bugeja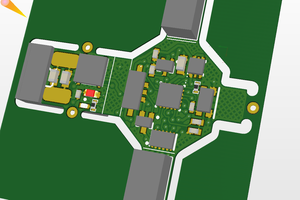
 Joshua Elsdon
Joshua Elsdon
 Matthias Kubisch
Matthias Kubisch
 Gaultier Lecaillon
Gaultier Lecaillon
I really like this idea and I hope to see it actually get built.
A couple thoughts based on prior experience:
- It's really difficult to move in a straight line with differential steering and DC gear motors. Some ideas to combat this:
- - Add an IMU / Compass and use software to compensate
- - Change the design to use one motor for a single power wheel and the other to turn that wheel. Or use a servo to turn the wheel, but that will drain the battery faster.
- - Come up with a way of locking the drives together mechanically when going forward. This can be as simple as a friction clutch where the motors will "want" to move together, but with enough drive, can be forced to deviate from each other. Adjusting this clutch is tricky.
- - Switch to continuous rotation servos. You can save battery life by adding a big mosfet switch which powers them off when they aren't running... or not. They work very well as is, and don't cost all that much.
- A robot like this which interfaces with a cell phone, and can carry the phone around, gives you amazing computing power, all the sensors in the world, and an internet link and could still be the size of a business card. And the cell phone is basically free because you already have one. See my projects for a crazy idea on how to interface. Collaboration is wonderful.