 Nick Thatcher
Nick Thatcher-----------------------------------------UPDATE NEW FOOTAGE -----------------------------------------
John Dingley Riding his "BLUE STREAK" machine somewhere in the UK, derived from his original unicycle entered into the 2014 hackaday prize, as you can see in the video it actually works rather well!
For more info visit - https://sites.google.com/site/onewheeledselfbalancing/

------------------------------------------------------------------------------------------------------------------------

PROJECT OBJECTIVES
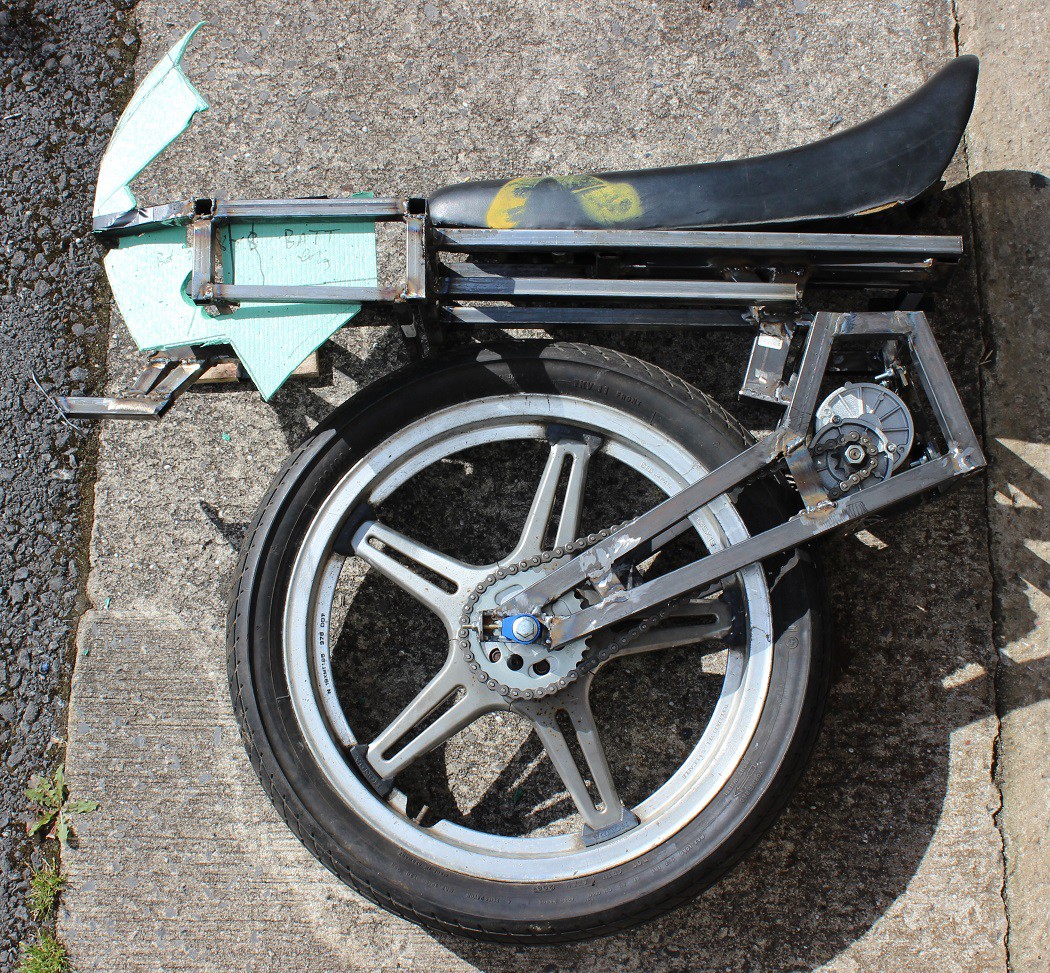
A) Self balancing electrically powered unicycle design, resembling a motorbike but with just one wheel.
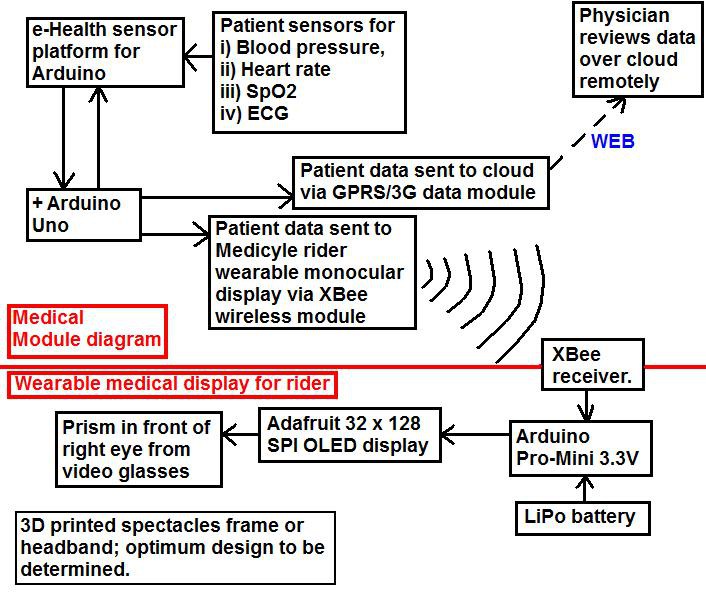
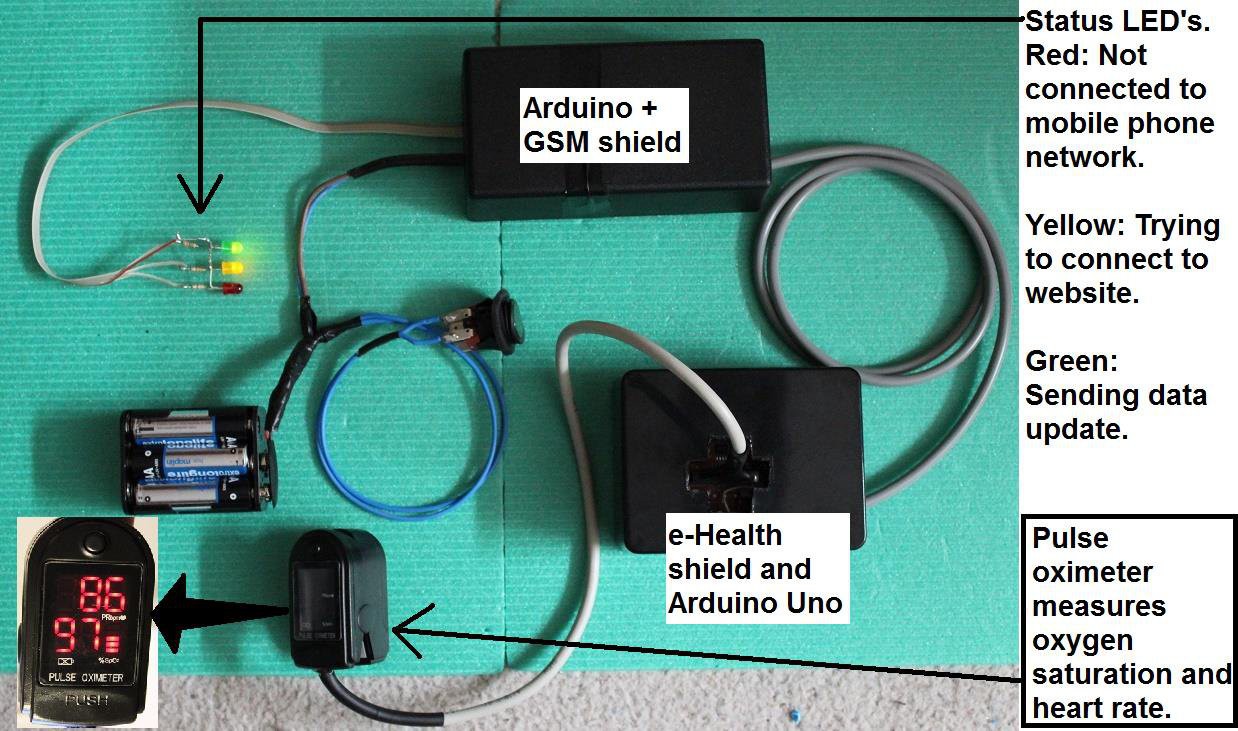
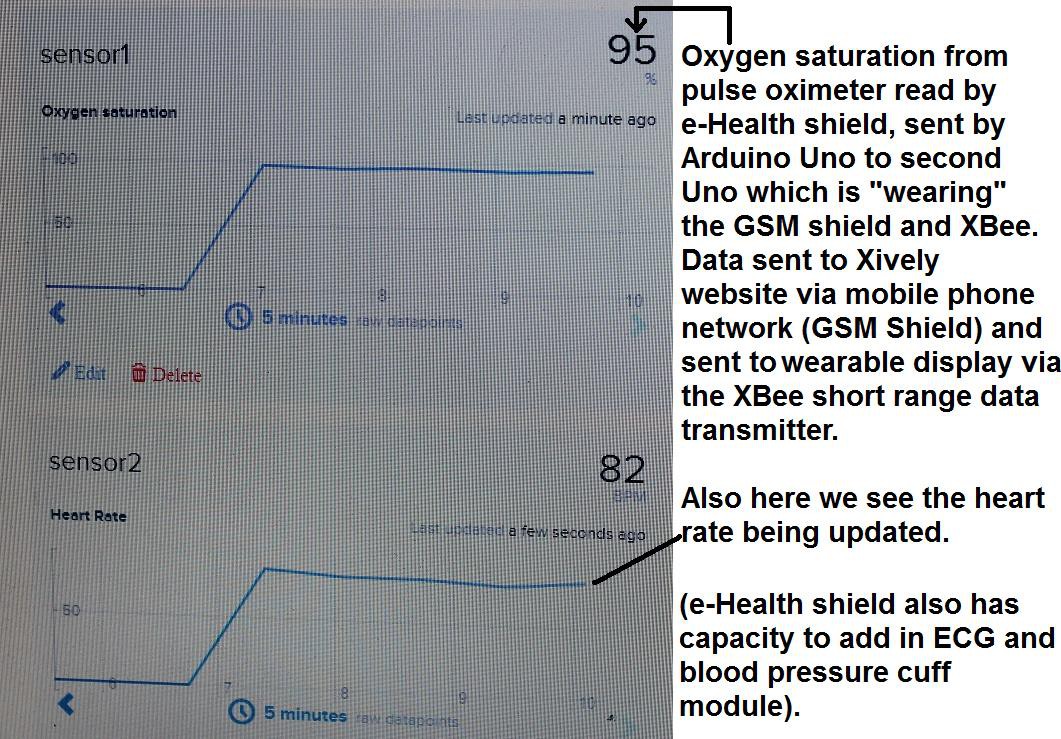
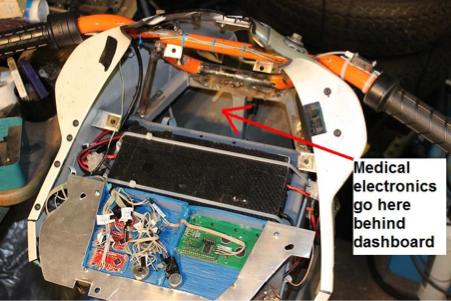
B) Configured as a first response paramedic vehicle of the future so it will carry basic medical kit and monitoring equipment such as ECG, Blood pressure cuff, oxygen saturation monitor.
C) Crucially, these will be integrated into the electronics of the machine and the data on the patient will be sent via a mobile data network to the web, for example so that a remotely placed doctor or co-ordinator can i) offer advice and ii) this allows a receiving hospital to have real-time medical data on the patient before they even arrive.......a form of telemedicine.
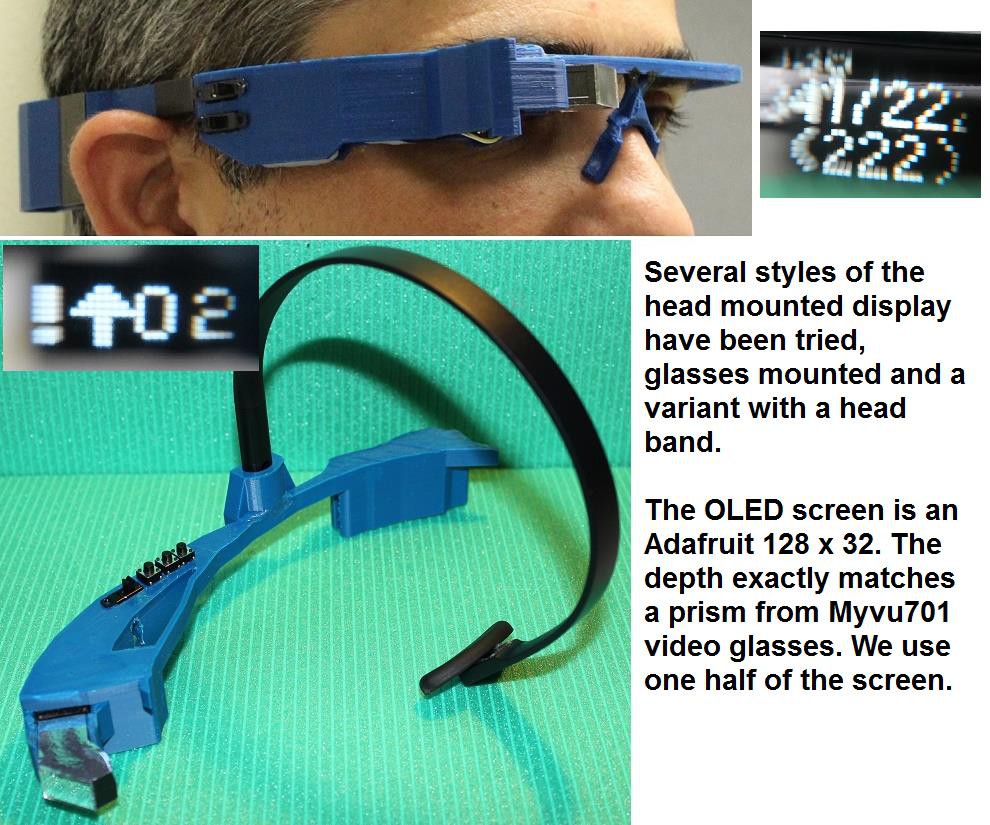
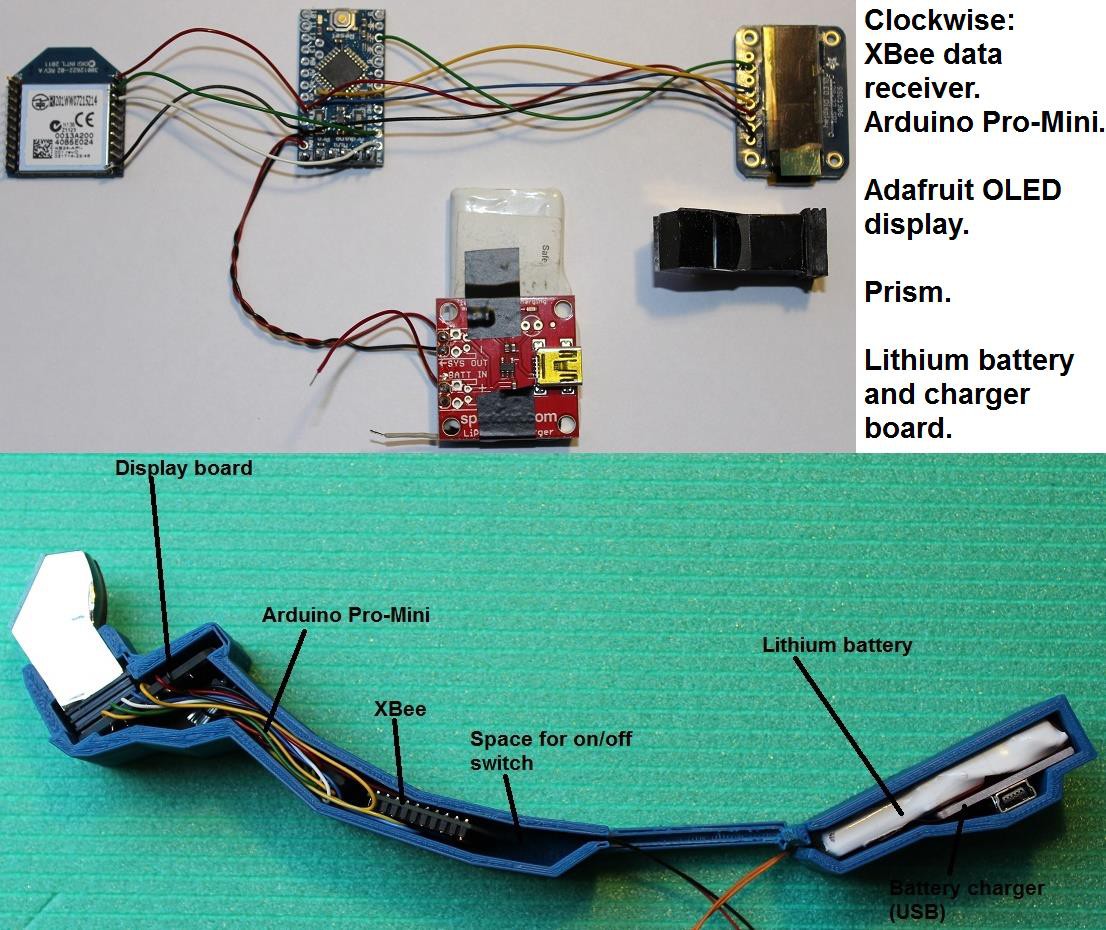
D) Helmet or head mounted monocular display of vital parameters using a high contrast OLED display and prism arrangement. These can be performance data of the unicycle (e.g. Tilt angle, remaining battery life, torque commends being sent to the motor) OR data on the casualty being attended by the paramedic.
Aim is to demonstrate all these functions in an integrated machine by the end of the competition.
Each main module will be developed in parallel with build updates on each, they will be listed under the following headings.
MEDICYCLE MECHANICALS
MEDICYCLE HELMET DISPLAY
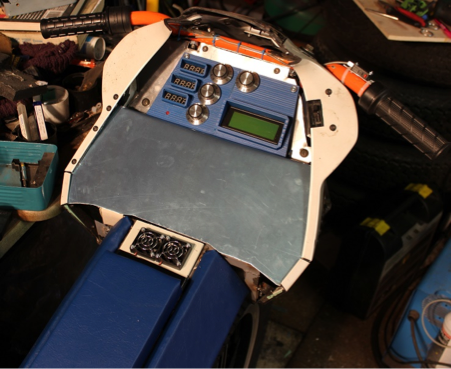
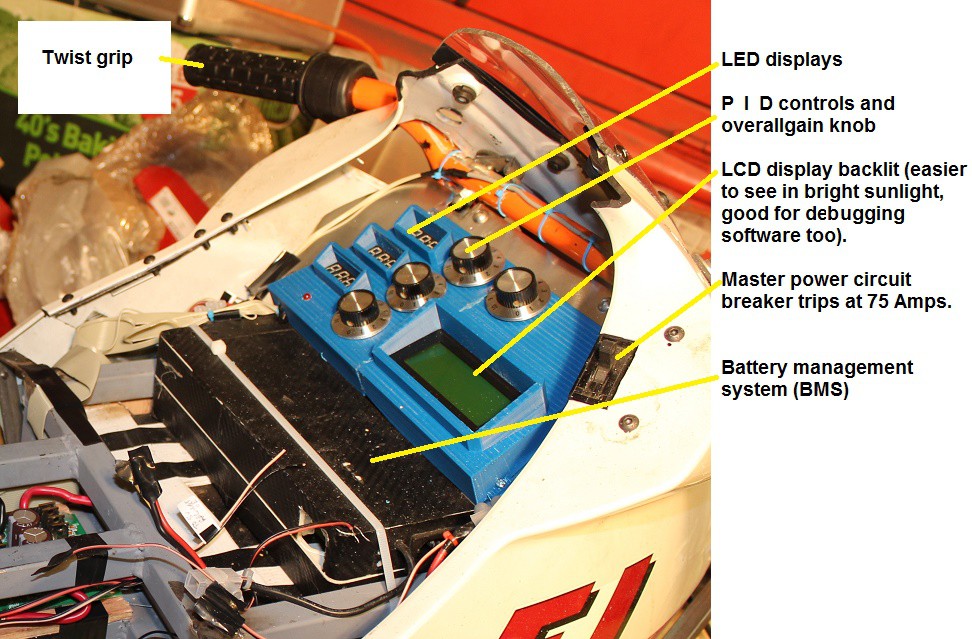
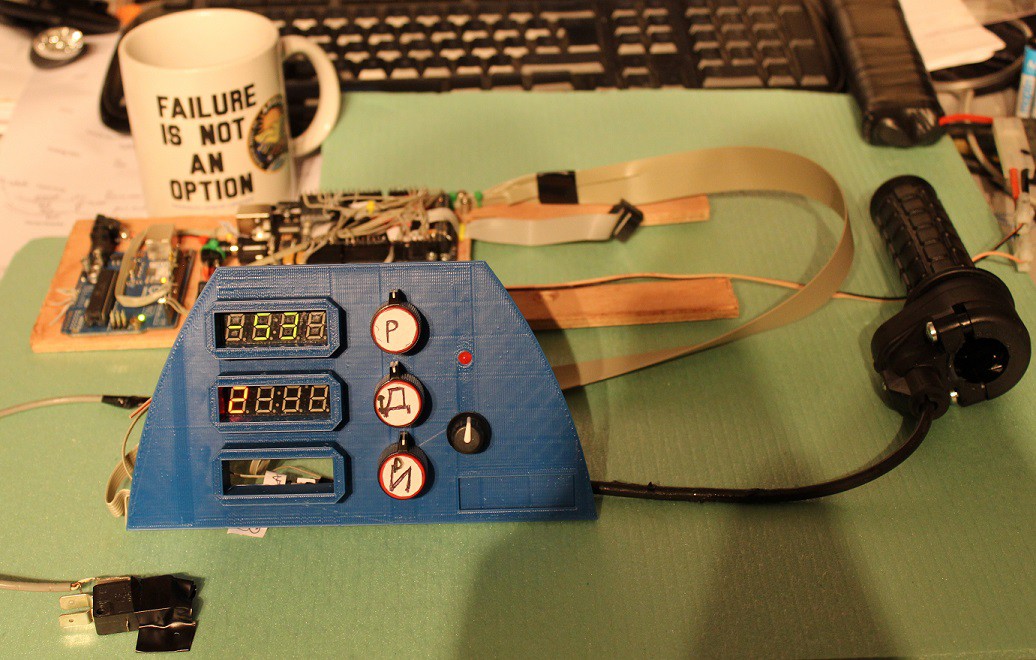
MEDICYCLE BALANCING AND POWER ELECTRONICS
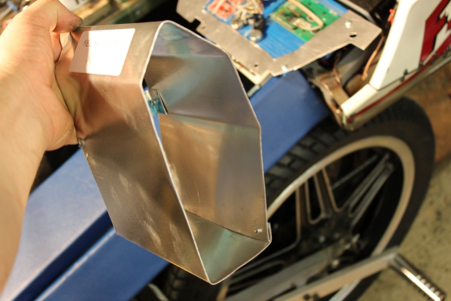
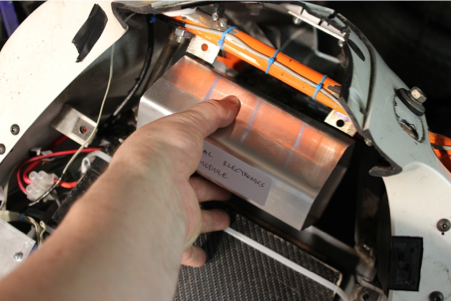
MEDICYCLE WEB-CONNECTED MEDICAL TELEMEDICINE MODULE
SYSTEM DESIGN
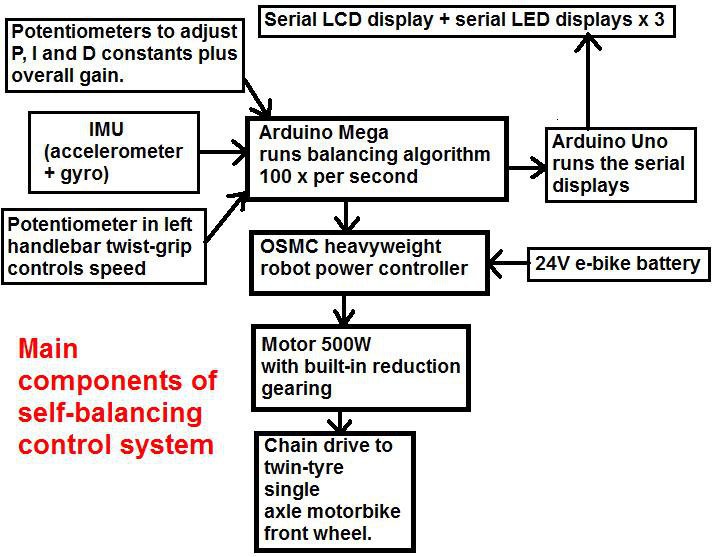
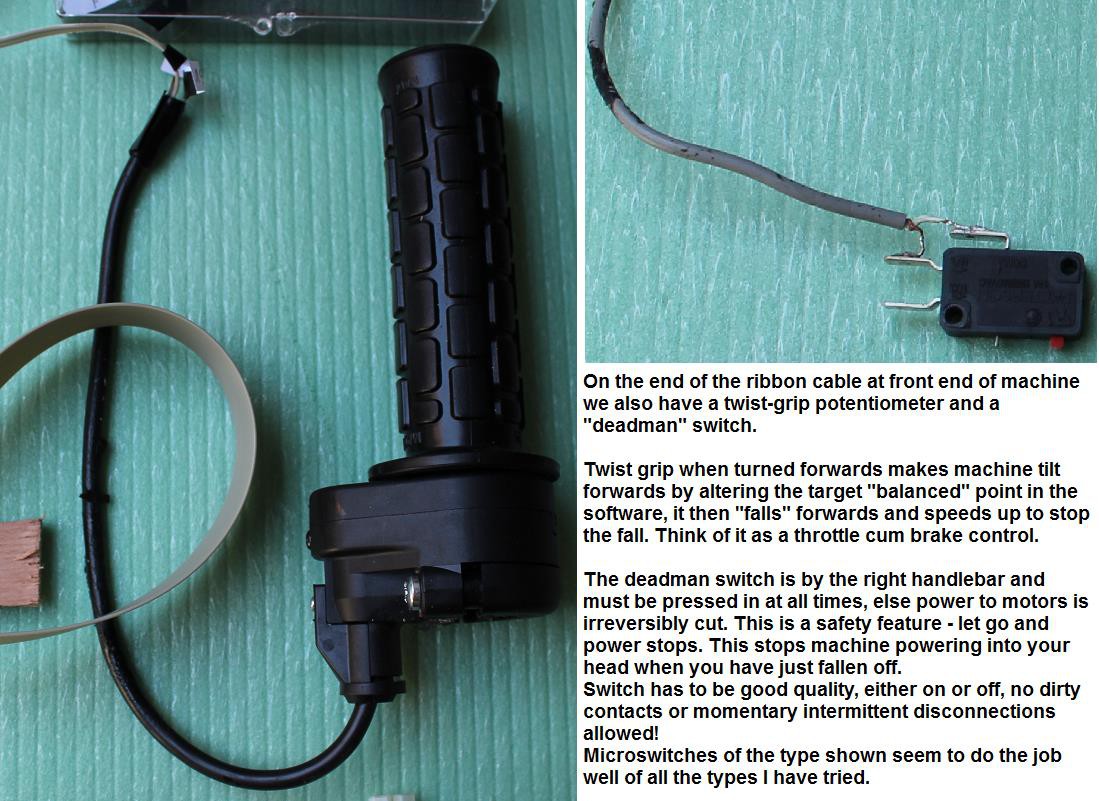
Self Balancing control System for Unicycle
Medical Pack and Monocular Display
CODE
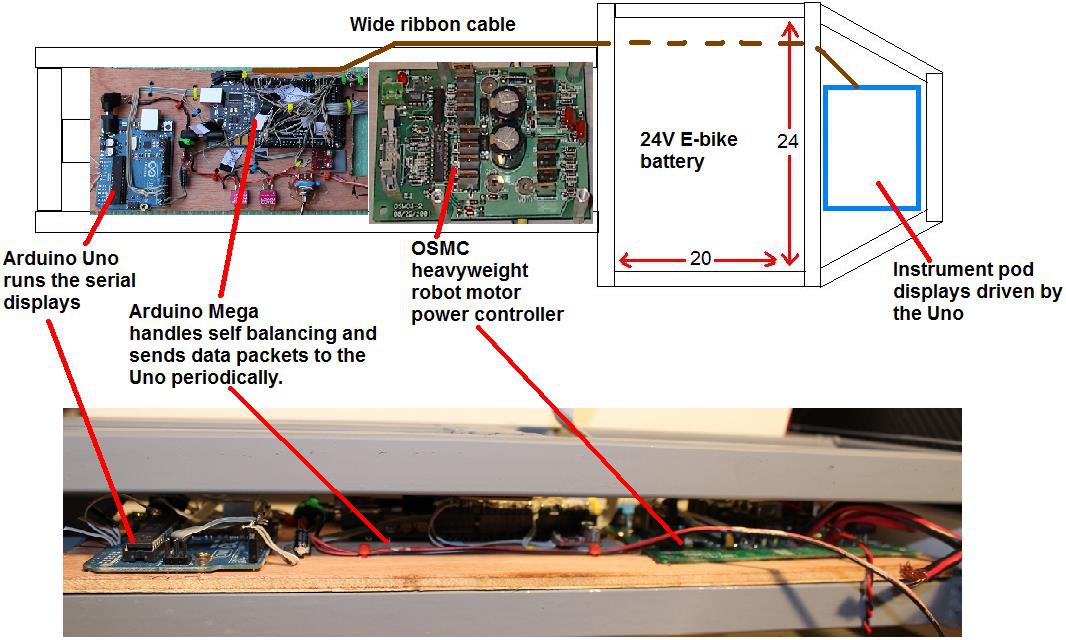
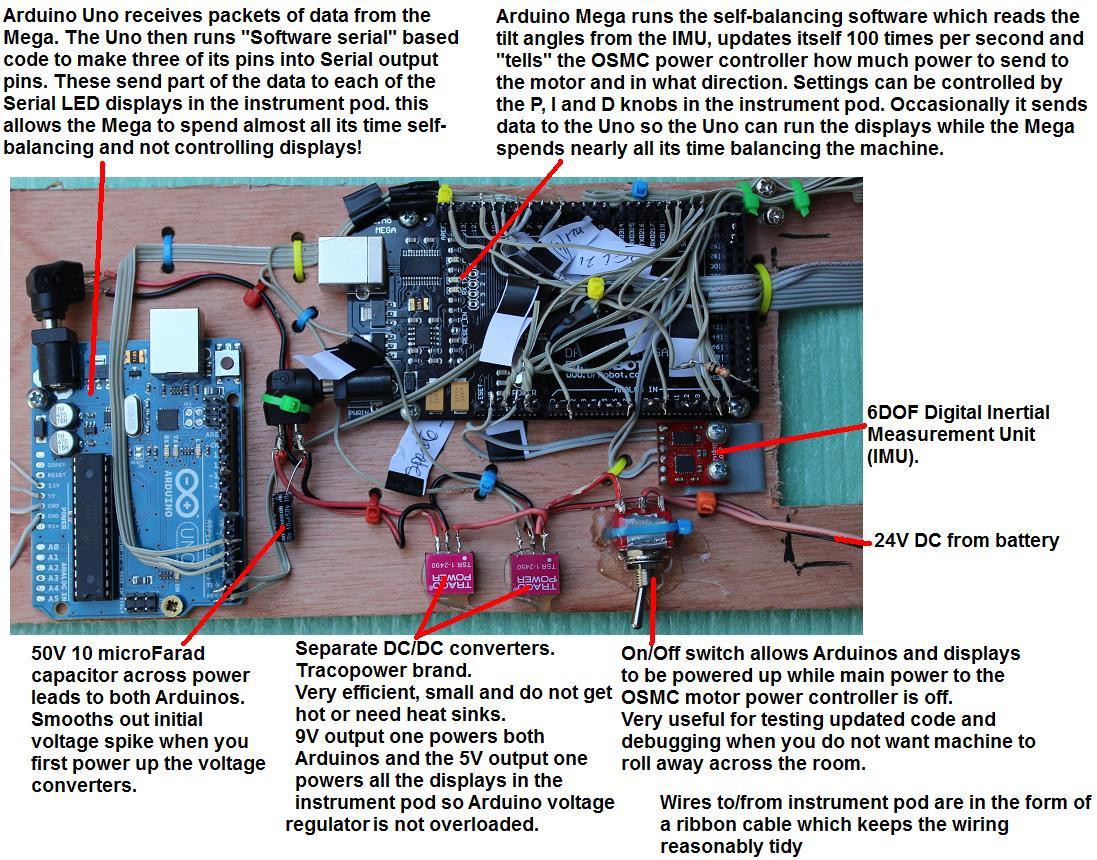
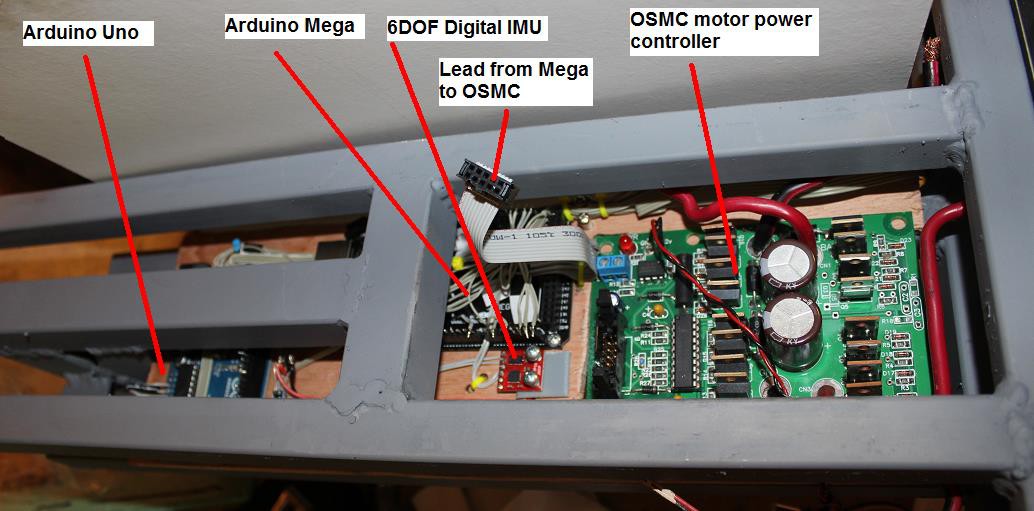
a) The code for the self balancing on the Arduino Mega 1280
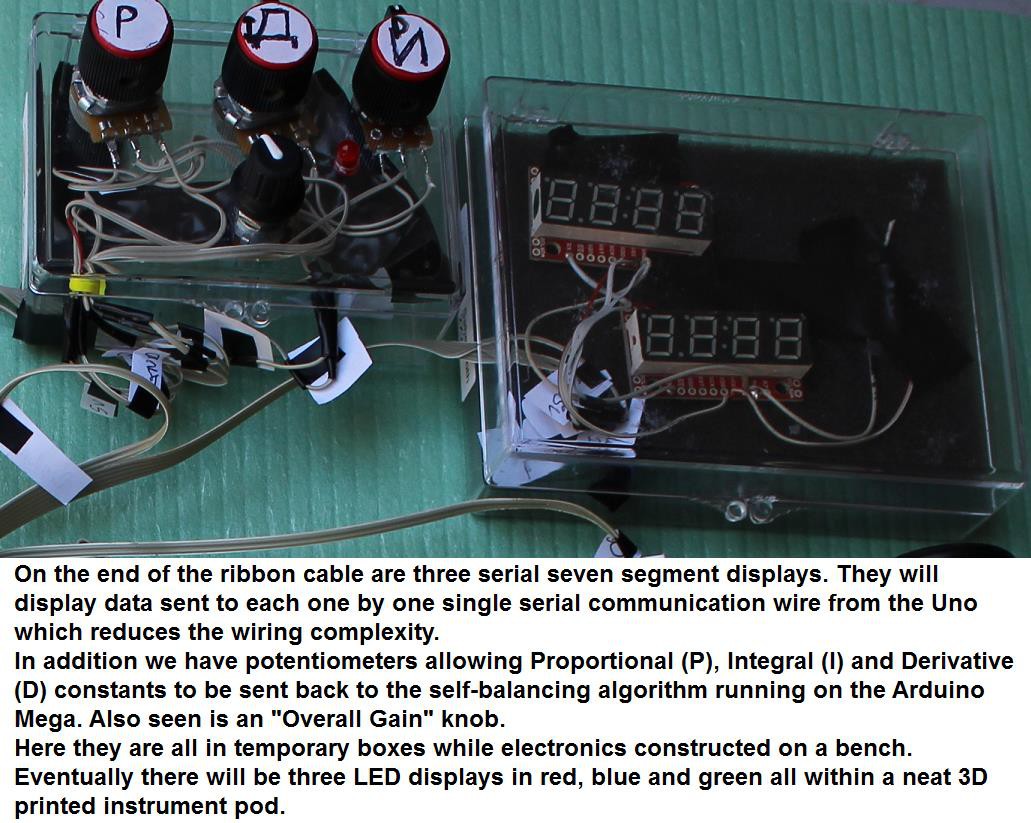
b) The code that runs on an Uno attached via serial link to the Mega, which then in turn runs the individual serial-enabled display modules on the front panel.
This lets the Mega spend all its time doing the self-balancing while the Uno can catch up running the displays in its own time.
c) The arduino in the wearable display.
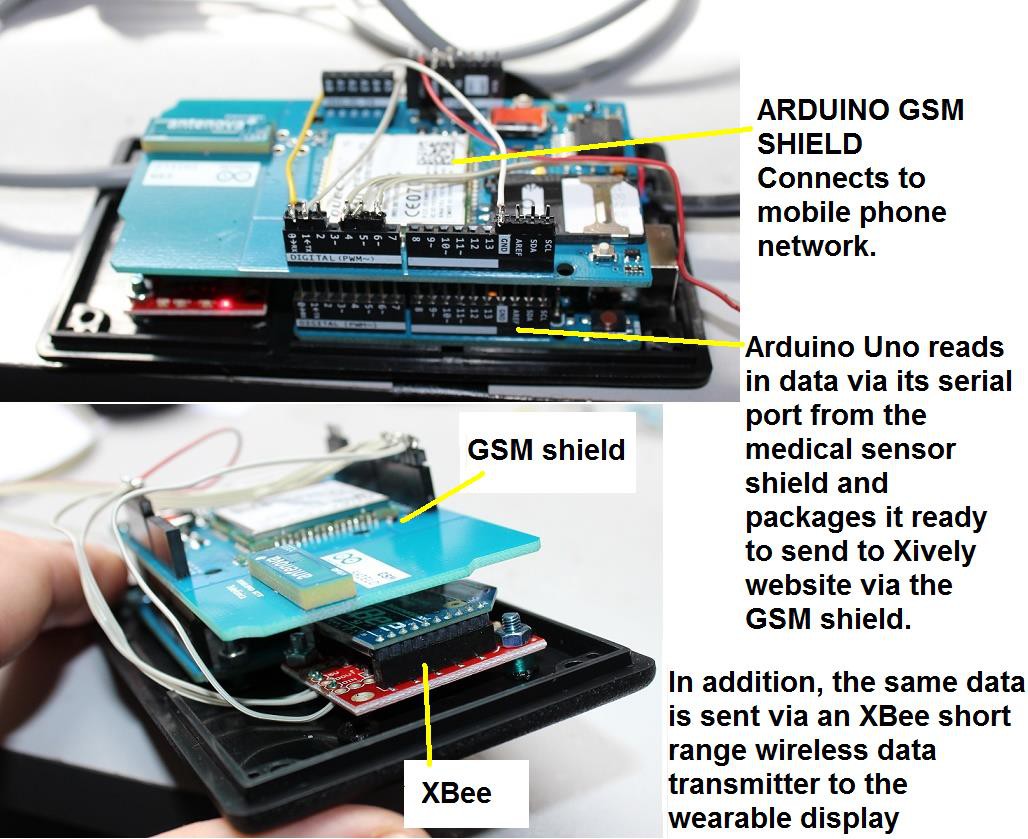
d) The arduino that the e-Health module is attached to.
e) The arduino the GSM (mobile phone) shield is attached to.
Here is the location of this website.:
































 mlo
mlo
 Chris Low
Chris Low
 Paul Crouch
Paul Crouch
hey bro
since i working on this similar project could help me in getting circuit digram of the ardino connection and the osmc connection diagram on my email id
kans.abhishek00@gmail.com
if you can it would be great help to me thank you