 Pierros Papadeas
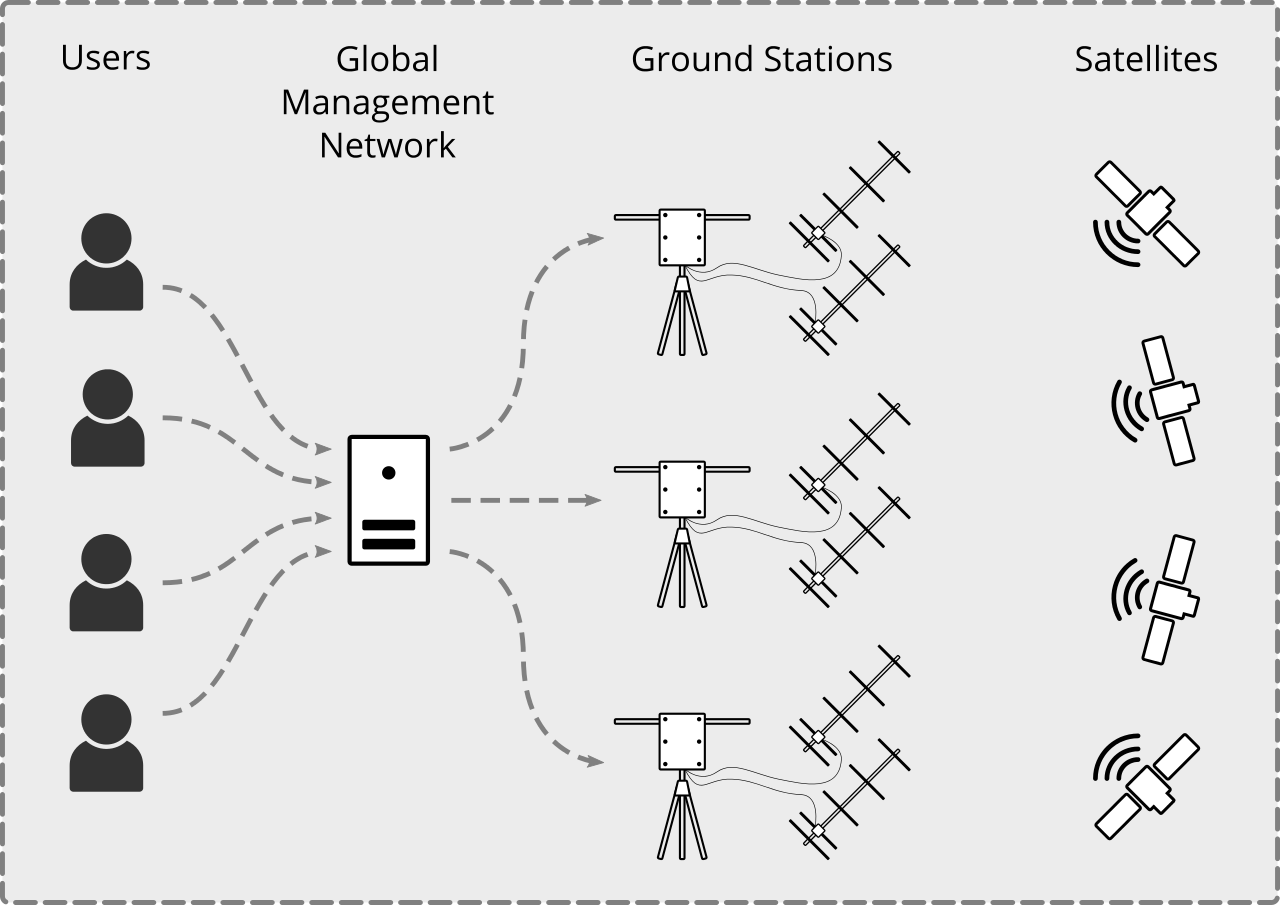
Pierros PapadeasSatNOGS is a modular and scalable stack for Satellite Ground Station implementation. Fully based on open source technologies and open standards, it provides interoperability with existing or future subsystems.
A Global Management Network is the key part of our stack, connecting multiple observers with multiple ground stations enabling tracking and monitoring of satellites from multiple locations around the world. The data gathered will be publicly accessible through the network website.
SatNOGS project is implementing the above general stack design using 4 different sub-projects.
SatNOGS Network - Our observations, scheduling and discovery server
SatNOGS DB - Our crowd-sourced suggestions transponder info website
SatNOGS Client - An embedded system that receives the scheduled operation from Network, records an observation and sends it back
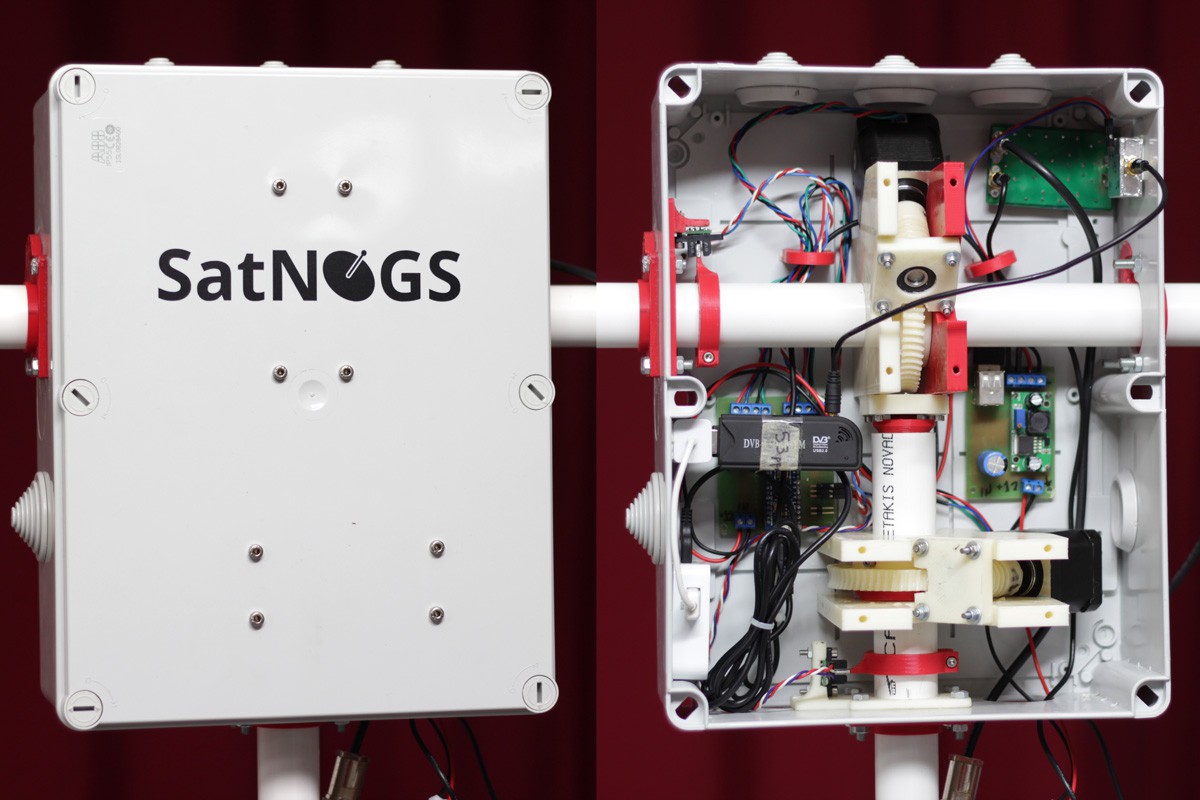
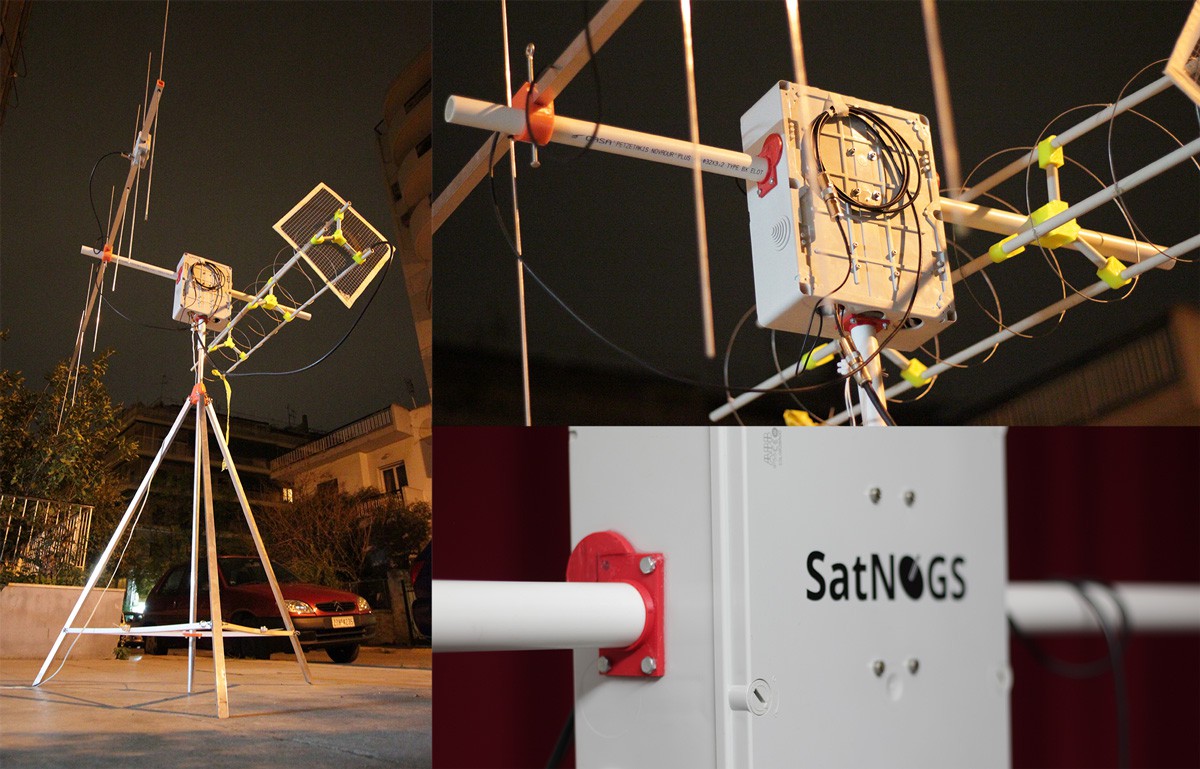
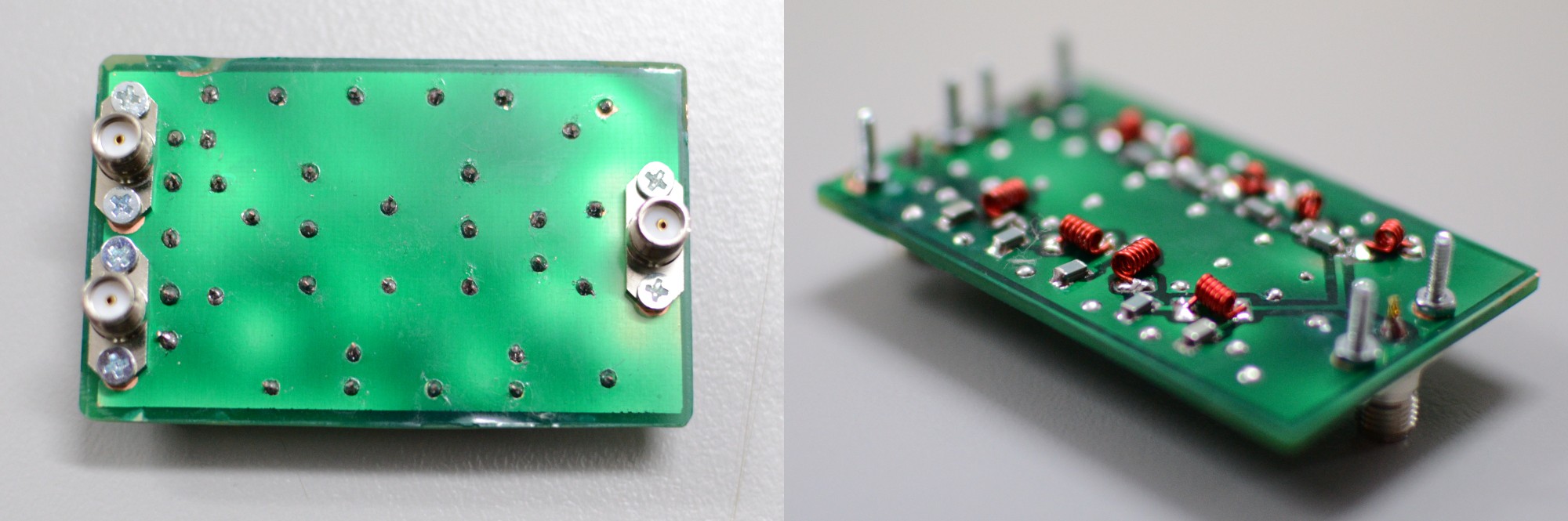
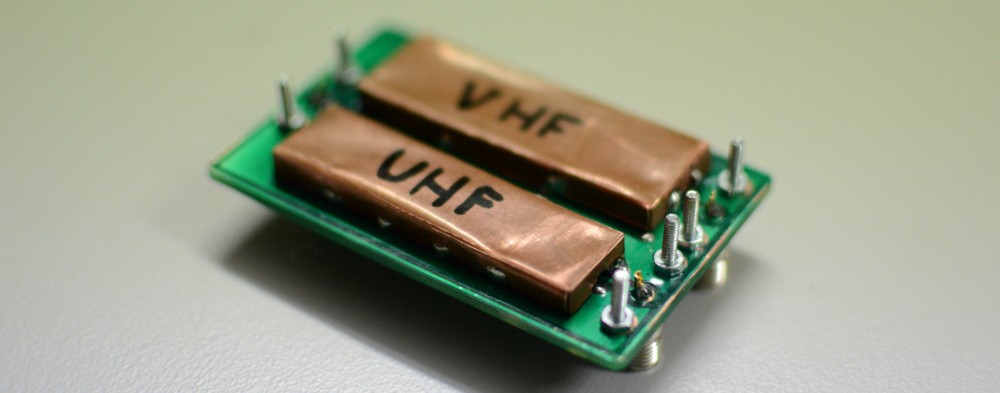
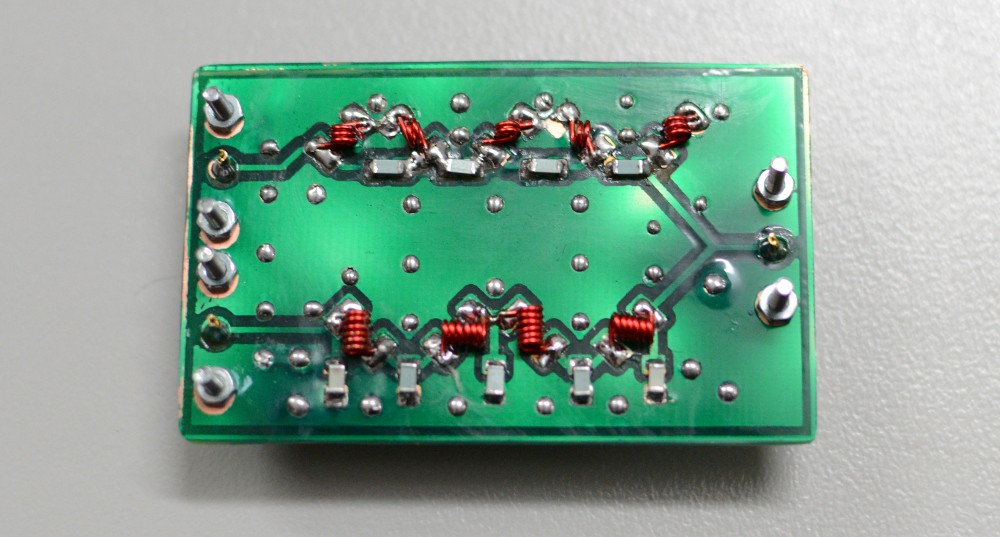
SatNOGS Ground Station - The actual ground station instrumentation with tracker, antennas, LNAs and connected to Client.

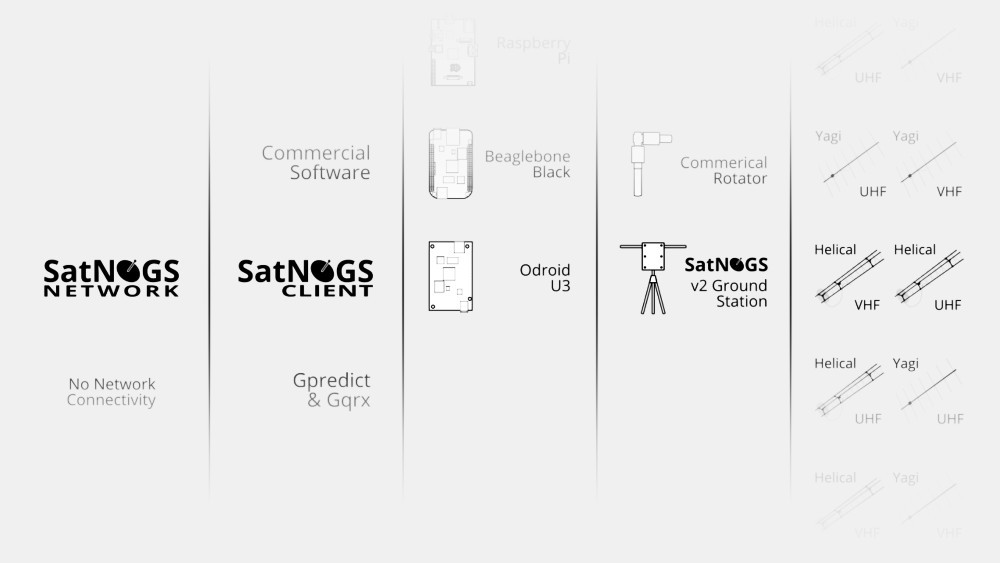
You can choose the configuration you want, re-using existing hardware:
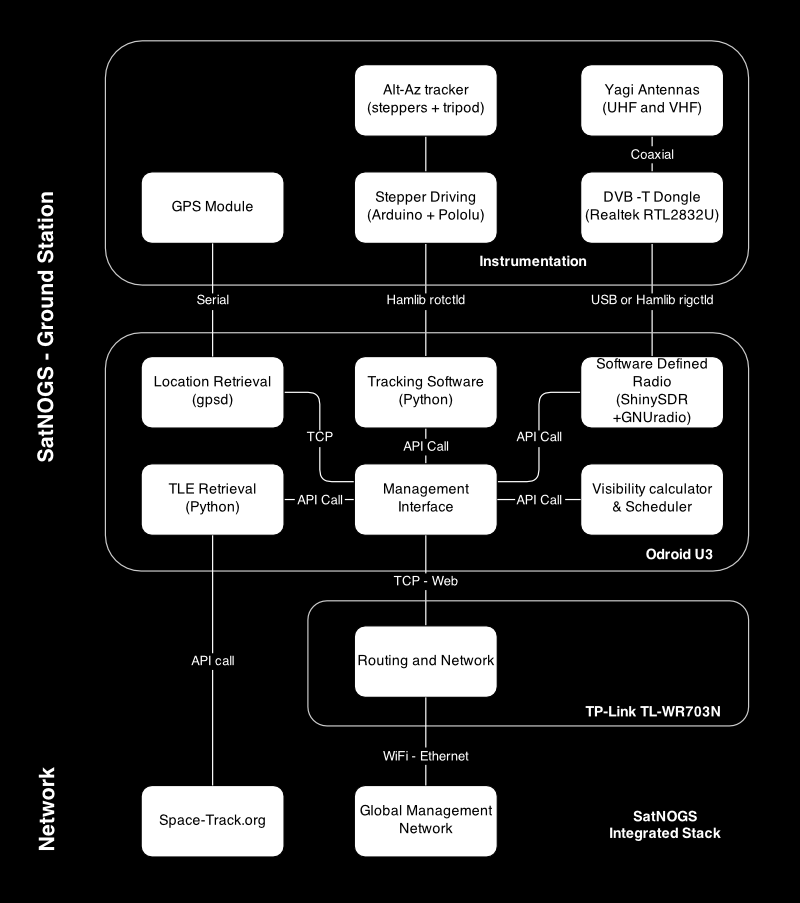
The following System Design visualization depicts all subsystems of a reference implementation of a SatNOGS Ground Station.
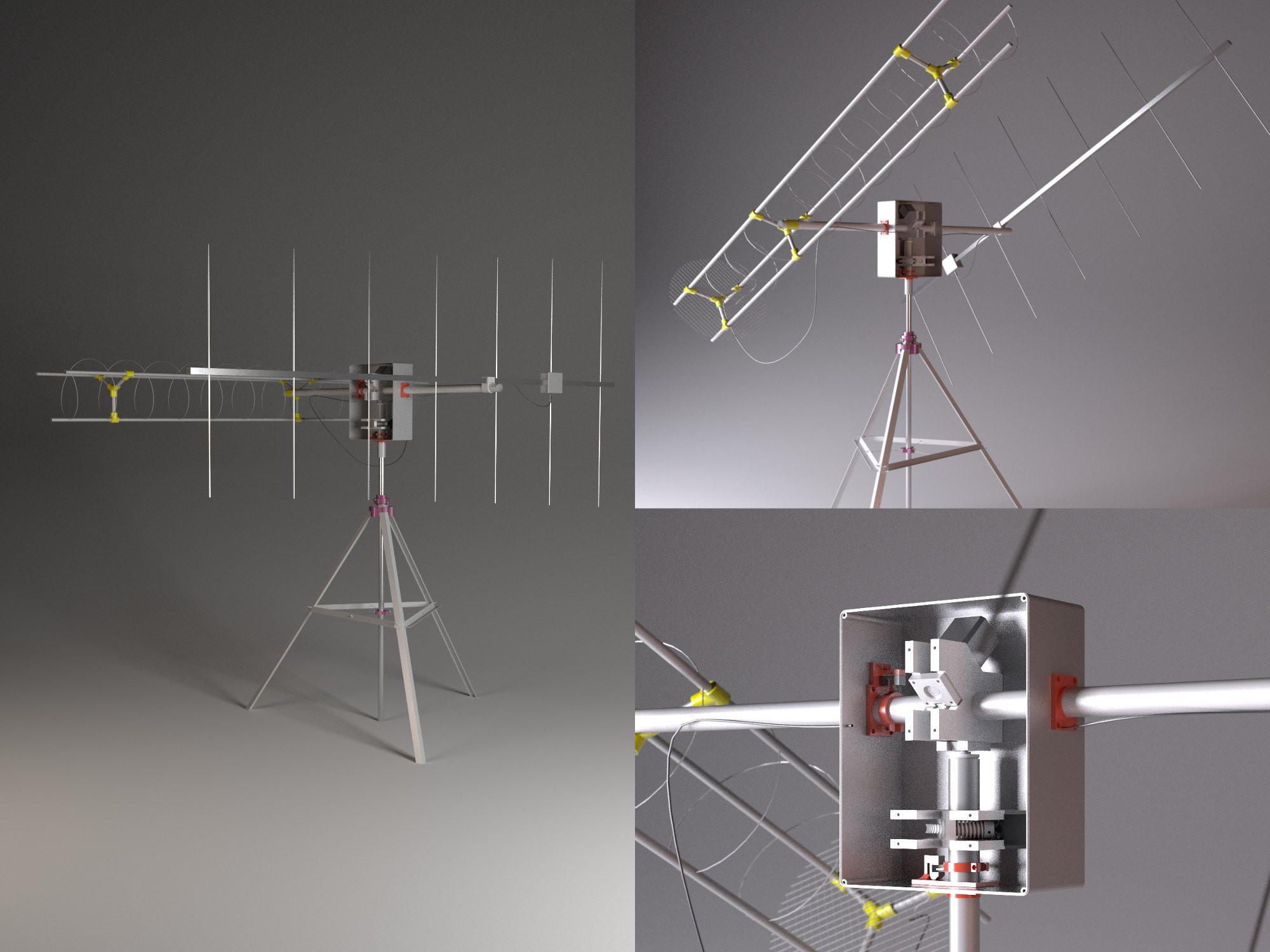
A rendering of the finalized ground station (with front cover open) can be seen here:








































 YJ
YJ
 Rusty Jehangir
Rusty Jehangir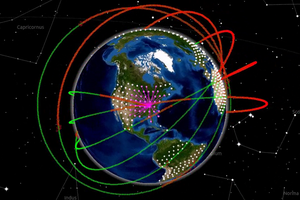
 hornig
hornig
I want to summarize what I have learned from the docs. First of all, SatNOGS is just a distributed radio telescope, capable of receiving signals from space. It can not transmit, only receive.
It is still unclear, what kind of information will I get, if I install my own antenna? Weather reports?
For me, more interesting thing will be satellite messaging. But it will require ground stations to be able to transmit.