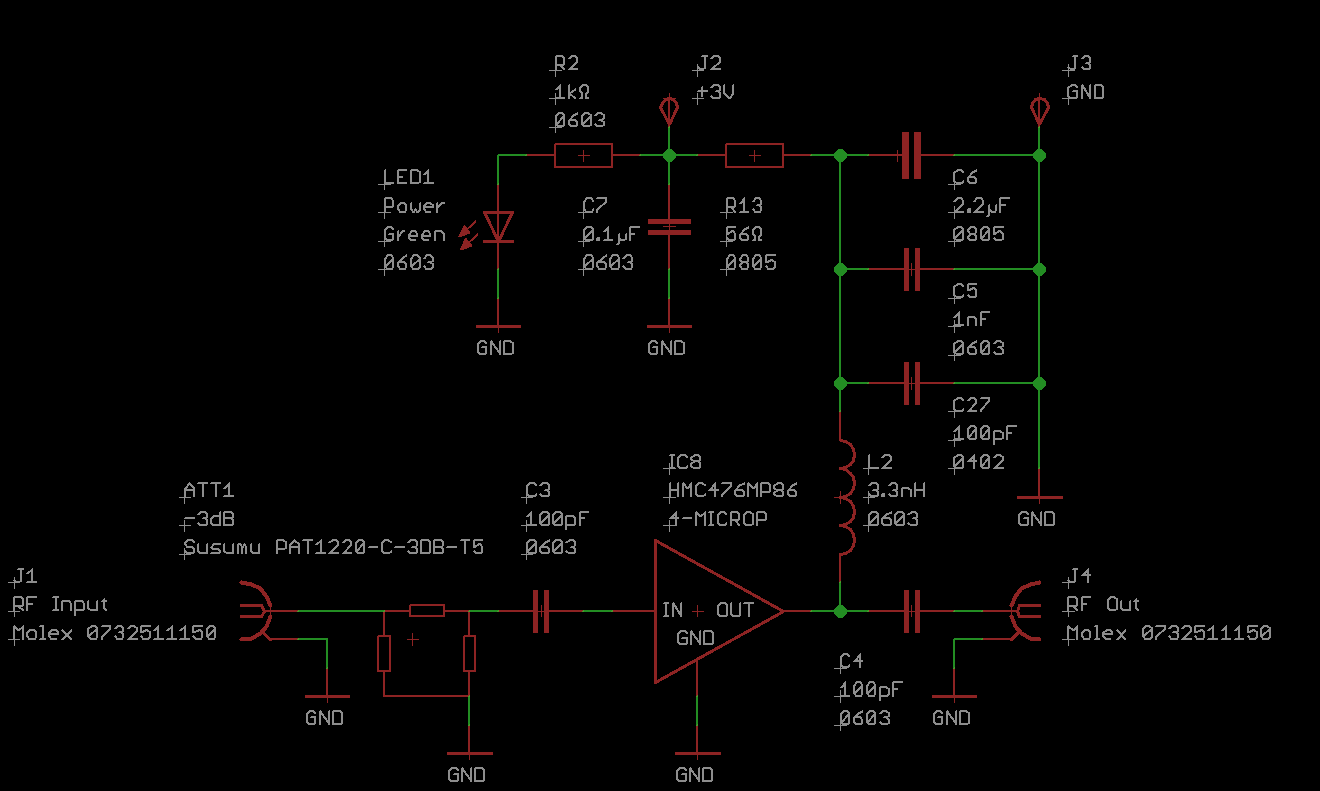
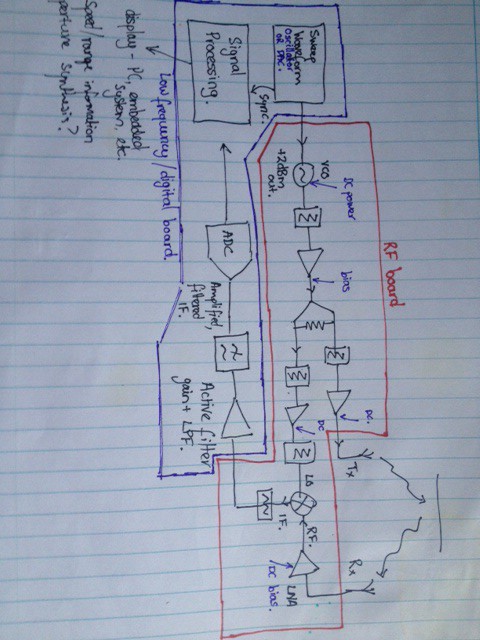
Frequency-modulated RF is generated by the Hittite HMC431 VCO at top left, at about 5.8-6.0 GHz, amplified by the HMC476 MMIC gain block at top left, and split in half by the Wilkinson divider at top center. Half the RF output from the divider is amplified again and sent to the transmit antenna connector at top right.
The local oscillator, from the other side of the splitter, is amplified again and applied to the LO port of the Hittite HMC219 mixer at bottom center. The reflected RF from the receive antenna comes in at bottom right, where it is amplified by the Hittite HMC717 6 GHz LNA and the amplified output is applied to the mixer.
A couple of pi attenuators are used, after the VCO, before the mixer LO port and after the mixer's IF output, to "tune" optimal mixer LO level and overall performance, although I haven't fixed certain values for these attenuators yet, space for them is left on the board.
IF filtering, amplification and signal processing, along with generation of the 0-10V modulation signal for the VCO, are done on a separate board. More details to come, as design, fabrication, revision and testing progresses.










 Tom Anderson
Tom Anderson
 Gabriel D'Espindula
Gabriel D'Espindula
 John Wetzel
John Wetzel
Zastanawiam się czy nie dało by się zrobić transmisji cyfrowej. Powiedzmy budujemy z metalu jakieś urządzenie jak francuzi i pokazujemy różne kształty.
Radarem zaś odczytujemy te kształty i na tej podstawie odczytujemy dane. Proste i wygodne. Jeden robot za ścianą macha pałeczkami a ktoś to odczytuje. Dało by się wysłac wiadomość do mastodon-ta