0%
0%
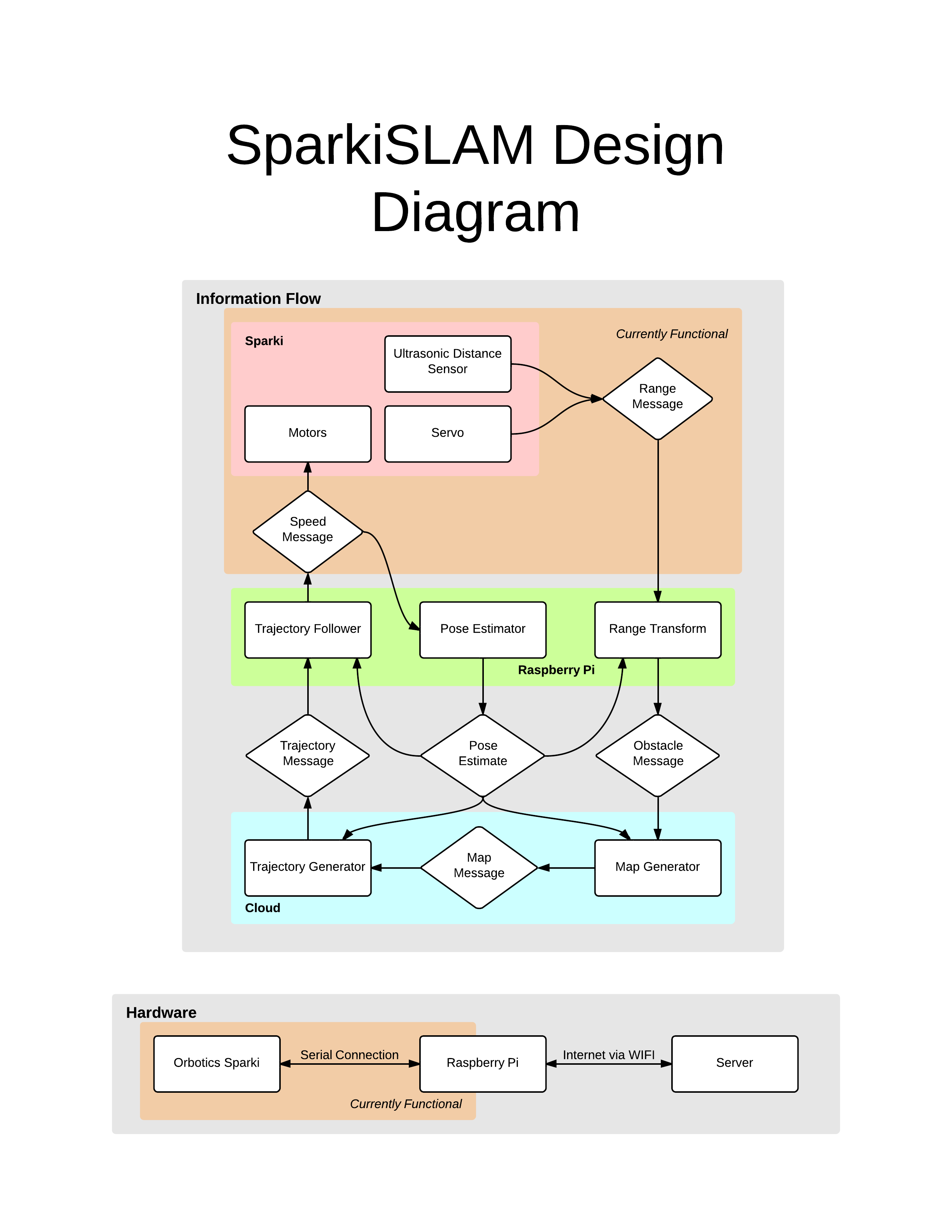
Sparki SLAM
An implementation of a Simultaneous Location and Mapping algorithm for the Sparki robot to be used in middle or high school robotics classes
 brnd4n
brnd4nBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Kevin Lhoste
Kevin Lhoste
 minifig404
minifig404
 Bud Bennett
Bud Bennett
 Enrico Miglino
Enrico Miglino
cool stuff, how fast does it loop on an arduino? they are slow