 Giovanni Durso
Giovanni DursoThe goal of my project is to provide a system that consists of a docking cone with wires that your batteries including their respective balance leads will be connected to that mounts to the bottom of multirotors. Inside the cone there will be a wide angle webcam, sonar and a single board computer. Onboard computer connects to a flight controller over UART using mavlink packets and it is expected that the flight controller is using the arducopter firmware version 3.1 rc7 (or a version that has sonar support for your chosen flight controller).
(Prototype rendering of the system)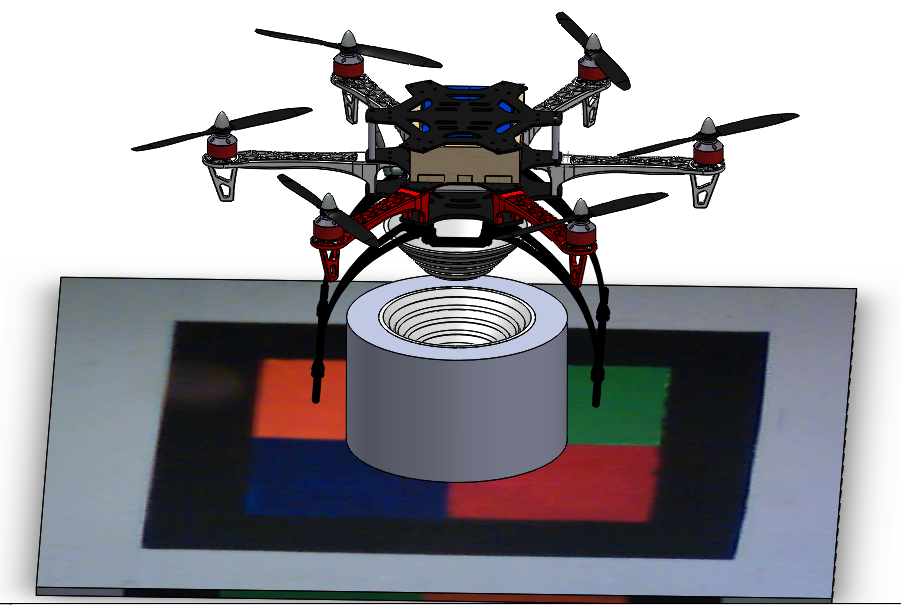
Currently I am designing it for the F550 frame from hobbyking which is a knock off of the DJI H550 frame with a set of tall springy landing skids (they are useful for rough landings and have saved my hex a few times) ,but the design can be easily adjusted to fit other frames by changing the parameters(height, width, angle and spacing of connection rings) of the docking cones.
The system may not be suitable for small multirotors as it weighs approximately 500g, but this weight could be reduced in later versions as I am not optimizing for weight due to tight time constraints and prototyping.
Integration with arducopter
At a later date when the project is more mature I am going to make further modifications to the arducopter software to add in configurations to allow easier external control and integrate my offboard controller more into the firmware to allow easier integration for people who want to use this system.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.