0%
0%
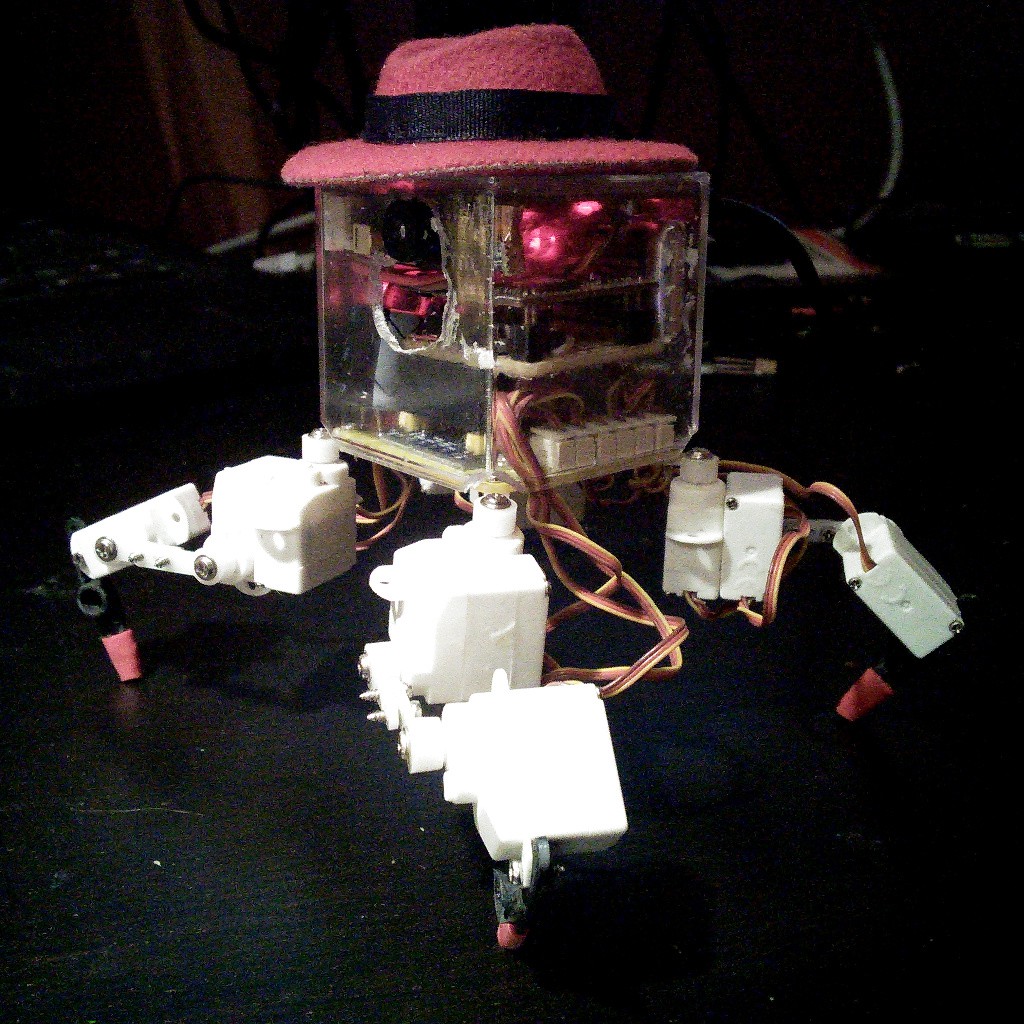
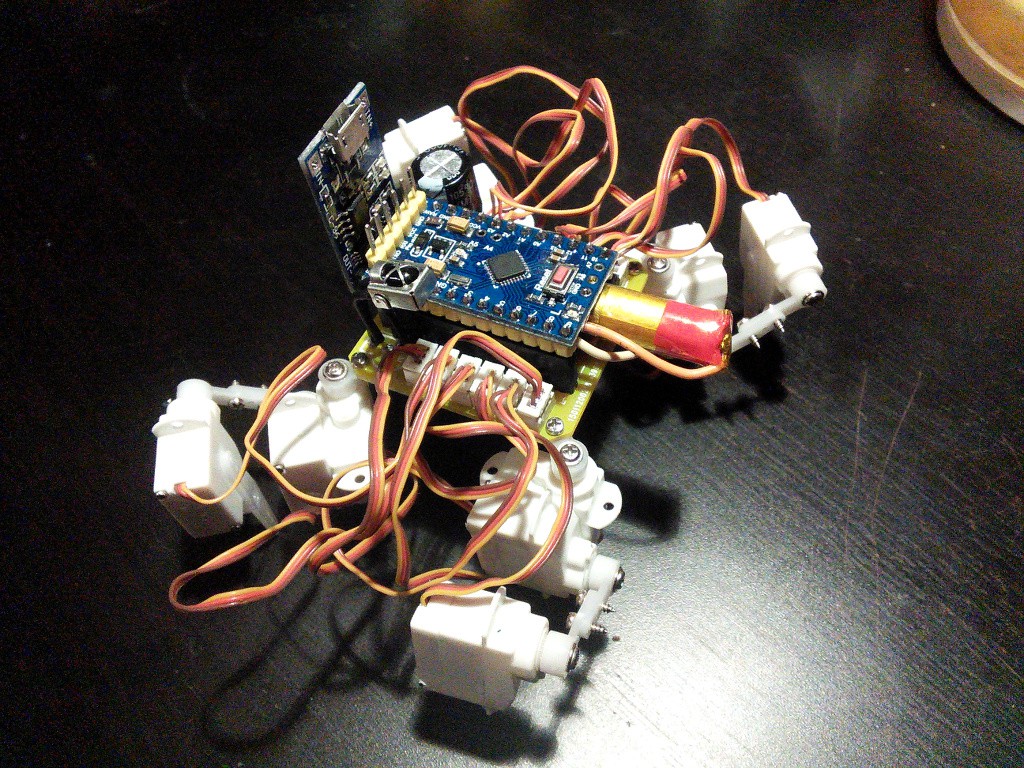
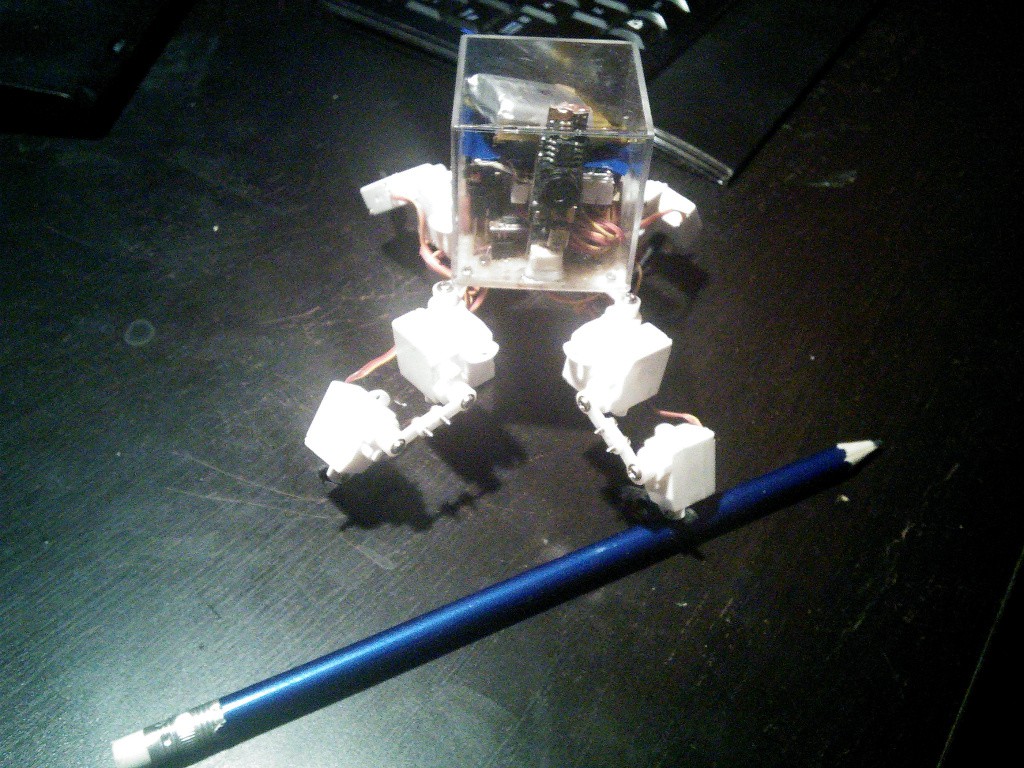
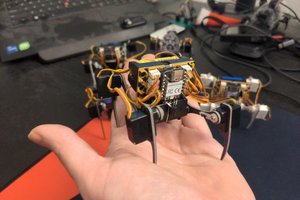
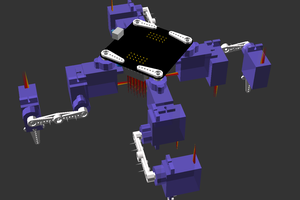
Pico-Kubik quadruped robot
The tinniest Arduino quadruped robot.
 deʃhipu
deʃhipuBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







Do you think you could stream video to an android app?, maybe even control it via an app? if so how would you do it?