 Dennis Meade
Dennis Meade6/10/2015 - The robot is assembled and can wander about under control of an Arduino Uno. A 9 DOF IMU is hooked up and produces positional values which are yet to be verified. The compass, however, produces reasonable directional values. This will support writing software that can make use this knowledge of the robot's position.
6/19/2015 Waiting for lock nuts has slowed me down. Now it's time to add several ultrasonic sensors. With a number of sensors I hope to keep the thing moving without a lot of stopping and starting.
I just enrolled in Autonomous Mobile Robots. which is being offered by ETH at edX.
6/26/2015 - One step forward, two steps back. Straightened out the wiring before it became completely unmanageable. Thanks for shrink wrap tubing. For the robot to do anything interesting a multiprocessing OS is needed, so I've chosen ArdOS which appears to have the features I need.
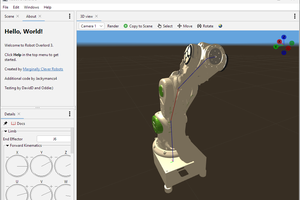
 Dan Royer
Dan Royer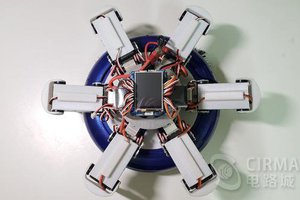
 Cirmall
Cirmall
 tab
tab
 Ted Huntington
Ted Huntington