 Roeland54
Roeland54After some fine tuning of the PID's we could finally do some test with 2 axis control by the computer.
but first something about the progress of connecting everything.
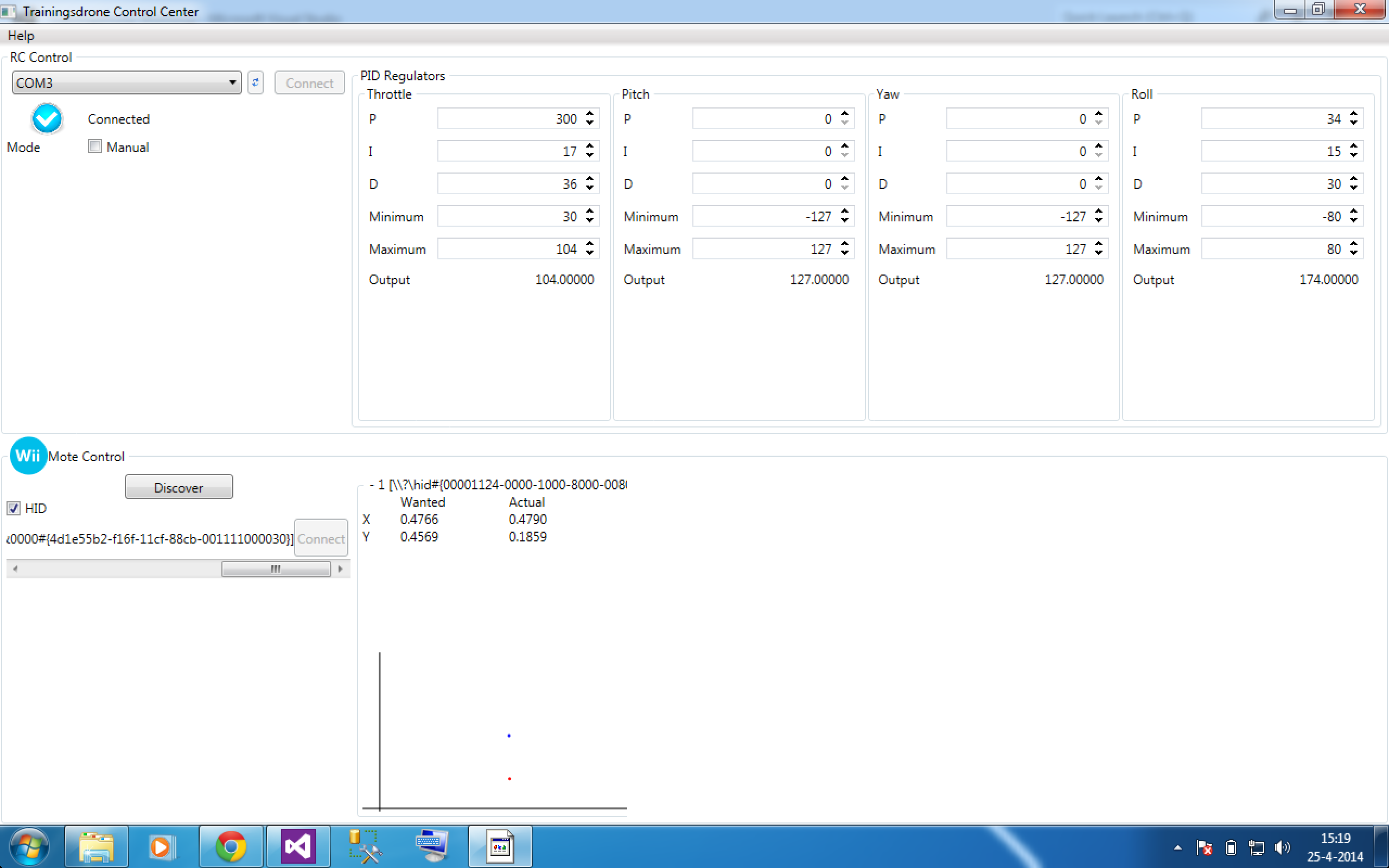
1. connect the available WiiMotes.
Once there is a WiiMote connected you get the 2-axis representation of de the detected IR-lightsource on the right (the red dot). You also can put the wanted location on de grid by clicking it (the blue dot).
2. Connect to the RCremote.
On the left upper corner there is the connection panel to connect to the arduino that sends the pwm signal to the rc-remote.
3. adjusting pid gain value's
you can adjust the PID gains and min, max values realtime with the text boxes. The current output is also visible (value between 0 and 255).
So with 1 WiiMote we can determine the position of the quadcopter in 2-axis.
the other axes can still be controlled by the RC remote in the classic way.
Time for a little demo:
Wat is happening here is that the computer is adjusting the throttle (height) and the roll. (the orange propellers are the front.)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.