 Dan Royer
Dan RoyerTeaching a robot arm what to do from a keyboard with inverse kinematics is friggin' hard. The IK has lots of singularities - special cases where things suddenly go stupid. To avoid this I'm trying to make a 6DOF joystick.
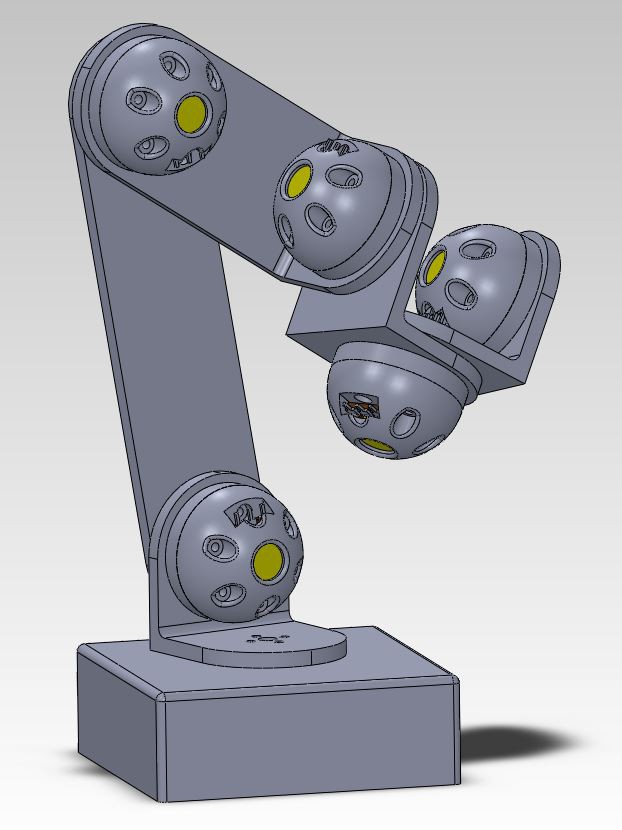
It works just like the robot arm but it has no motors. When I move it around the arduino in the base will pick up the angle values, copy that to the simulation on the screen, and even send it to the robot arm.
I've already made the sensor blocks. See picture 1 and picture 2 on instagram. There's a sensor block under the base, next to the arduino. I need some 5mm female headers to plug in and someone to help me make the base, the L brackets, and the other mechanical parts. Anyone want collaborate with me?
In the mean time I'm printing another 5 blocks.
I hope this joystick will have other uses, too. Maybe Kerbal Space Program fans will be able to pull of orbital maneuvers more easily.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Are you sure? yes | no