 JackRC
JackRCI was in search for the best robotic gripper/hand for weeks and finally came across a brilliant solution from Aaron Thomen ( detail here ). Basically it utilize bicycle chain to mimic human finger movement. Each node of the chain represents one knuckle joint, and the combination of many knuckles represent the entire finger.
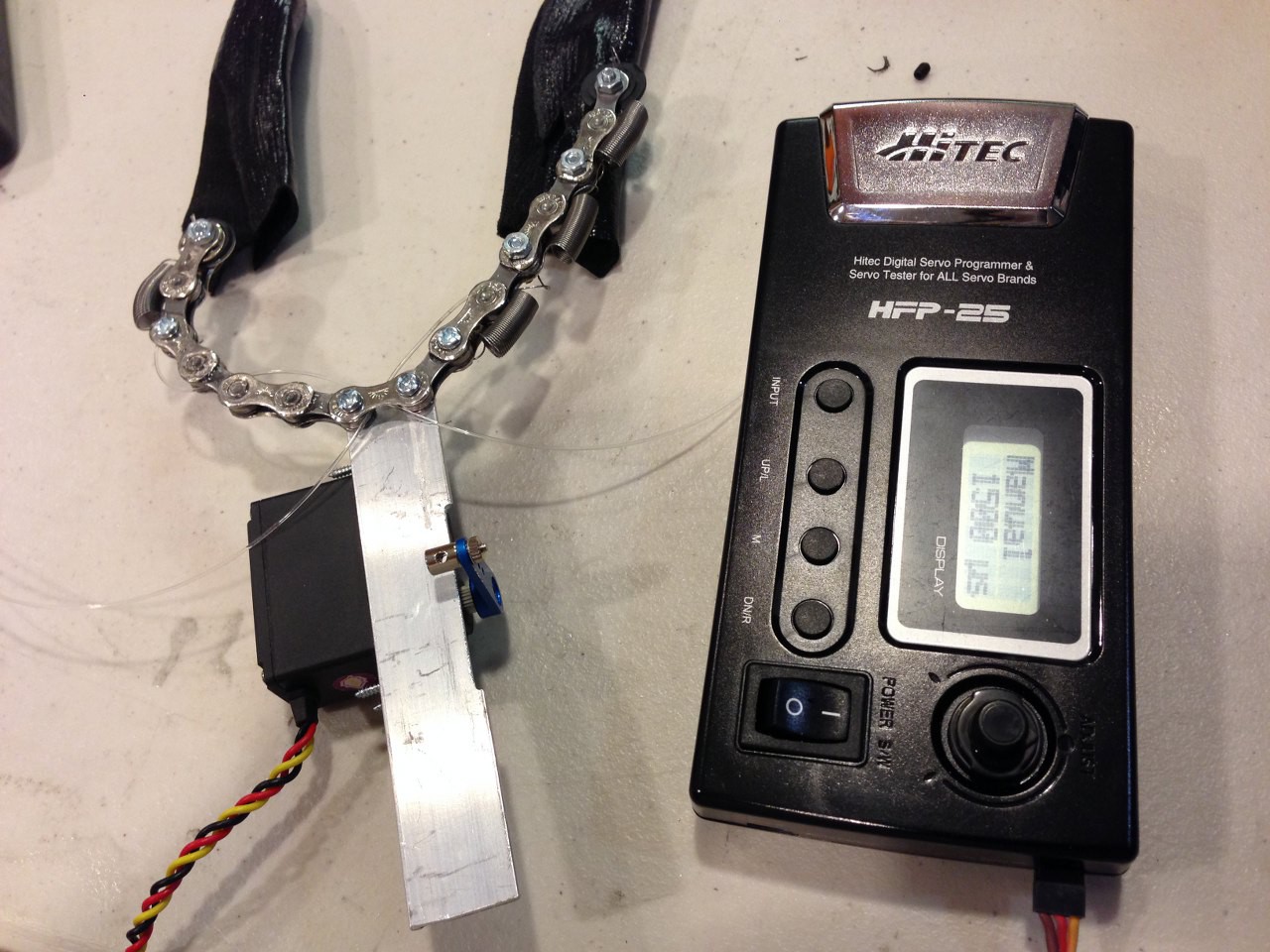
I was able to prototype my index finger and thumb out of bicycle chain with very similar geometry:

The best thing about bicycle chain design is that it has very little side movement, just like the human finger can only bend in one direction. Also this design only require one servo to operate the "grip movement" thanks to the spring at each joint to help relaxing the finger.

All the material for this robotic hand can be found local easily.
1. bicycle chain (Walmart or get it from your old bike)
2. heavy duty fish wire (Walmart or anything with similar strength)
3. spring assortment kits (Home Depot)
4. nuts and bolts (Home Depot)
5. aluminum angle bar (Home Depot)
6. Servo, servo arm and servo joint (hobby store)

Final touch will be a layer of fake skin (glove) to give it more grip and be more kids friendly.
The result???
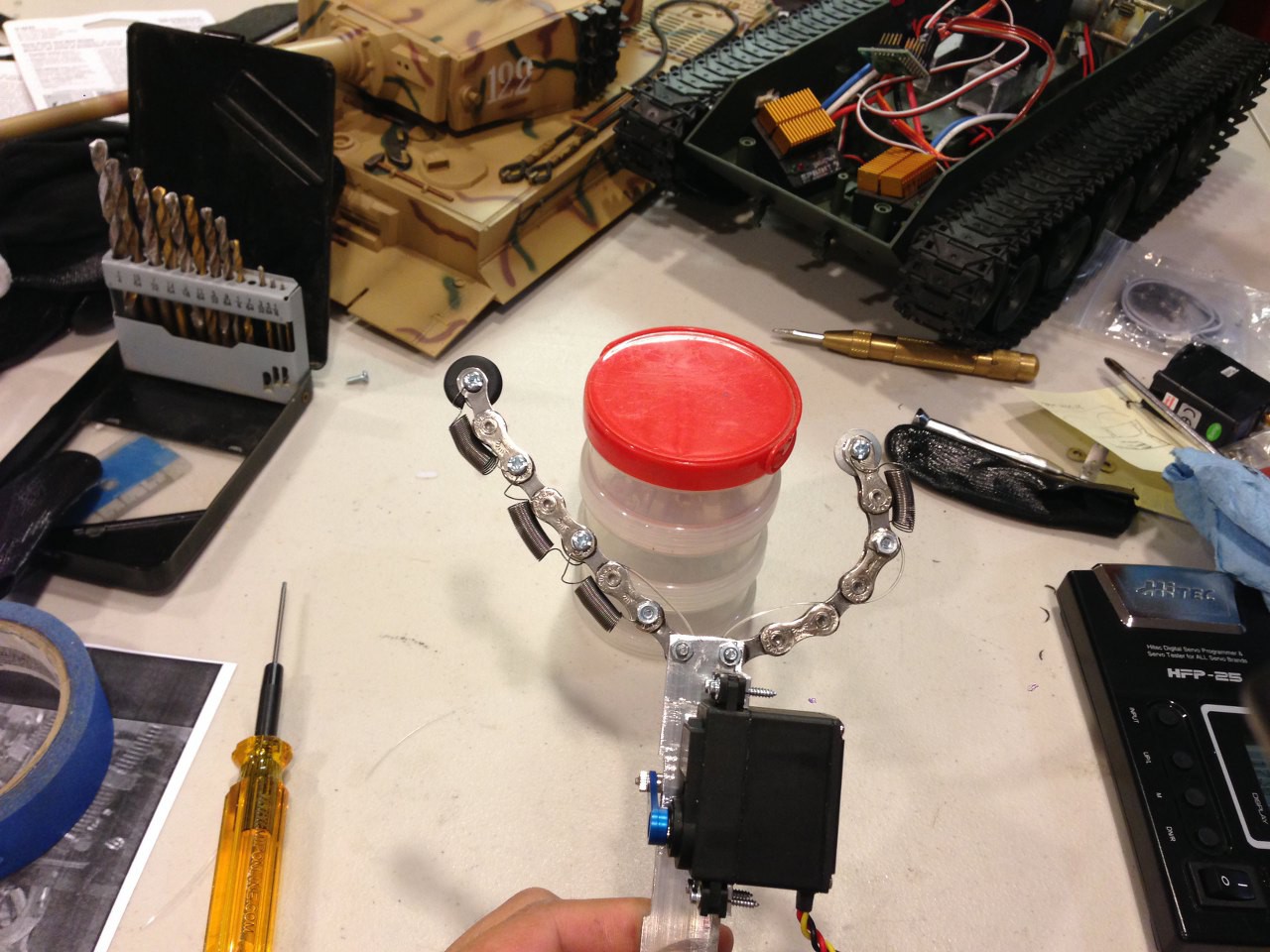
The chain is able to cover almost any object in contact because of it's flexibility. That make it works just like a human hand and hold on to the object tight.
One video win thousand words therefore I give you 2!!!
Prototyping:
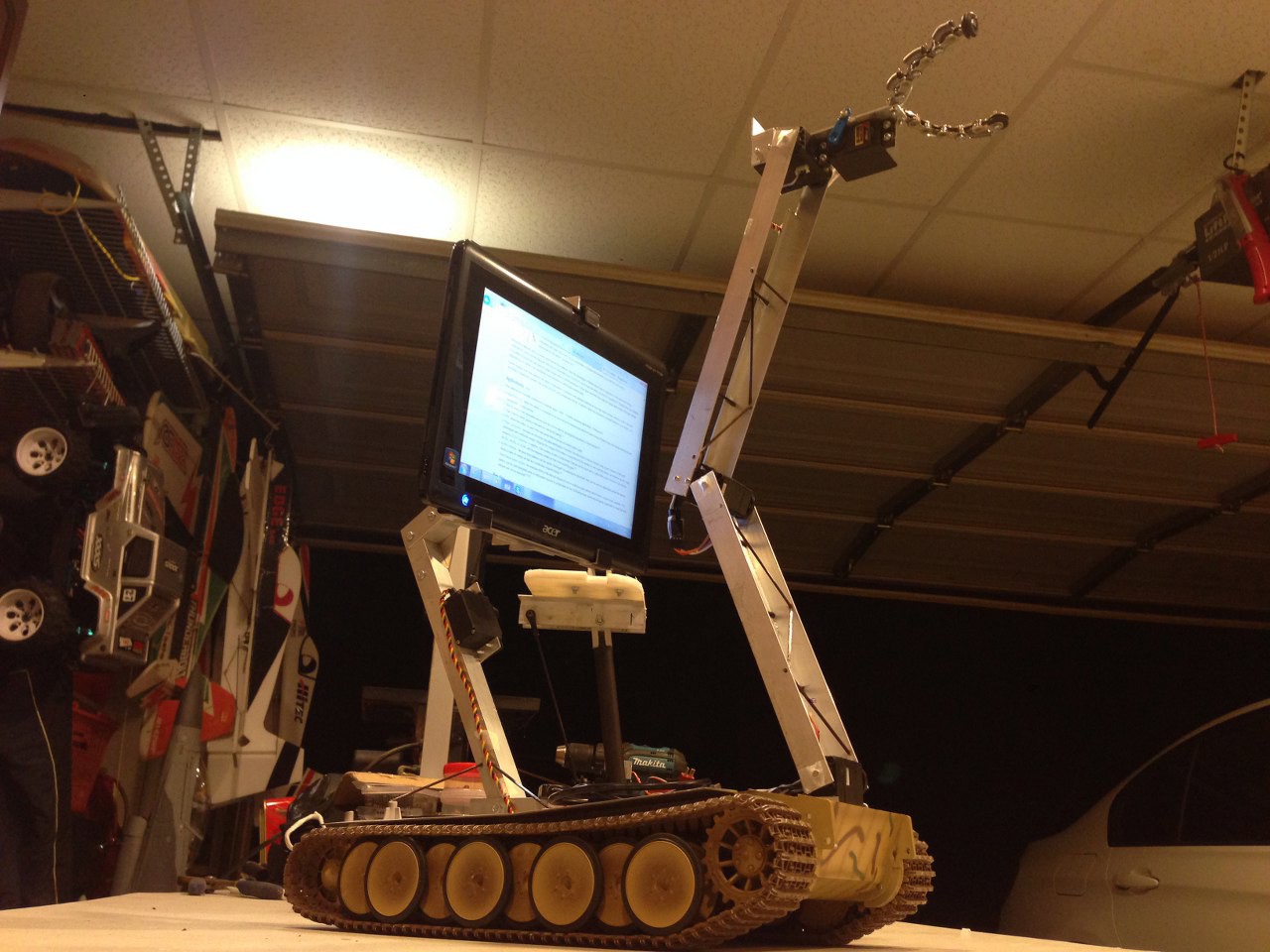
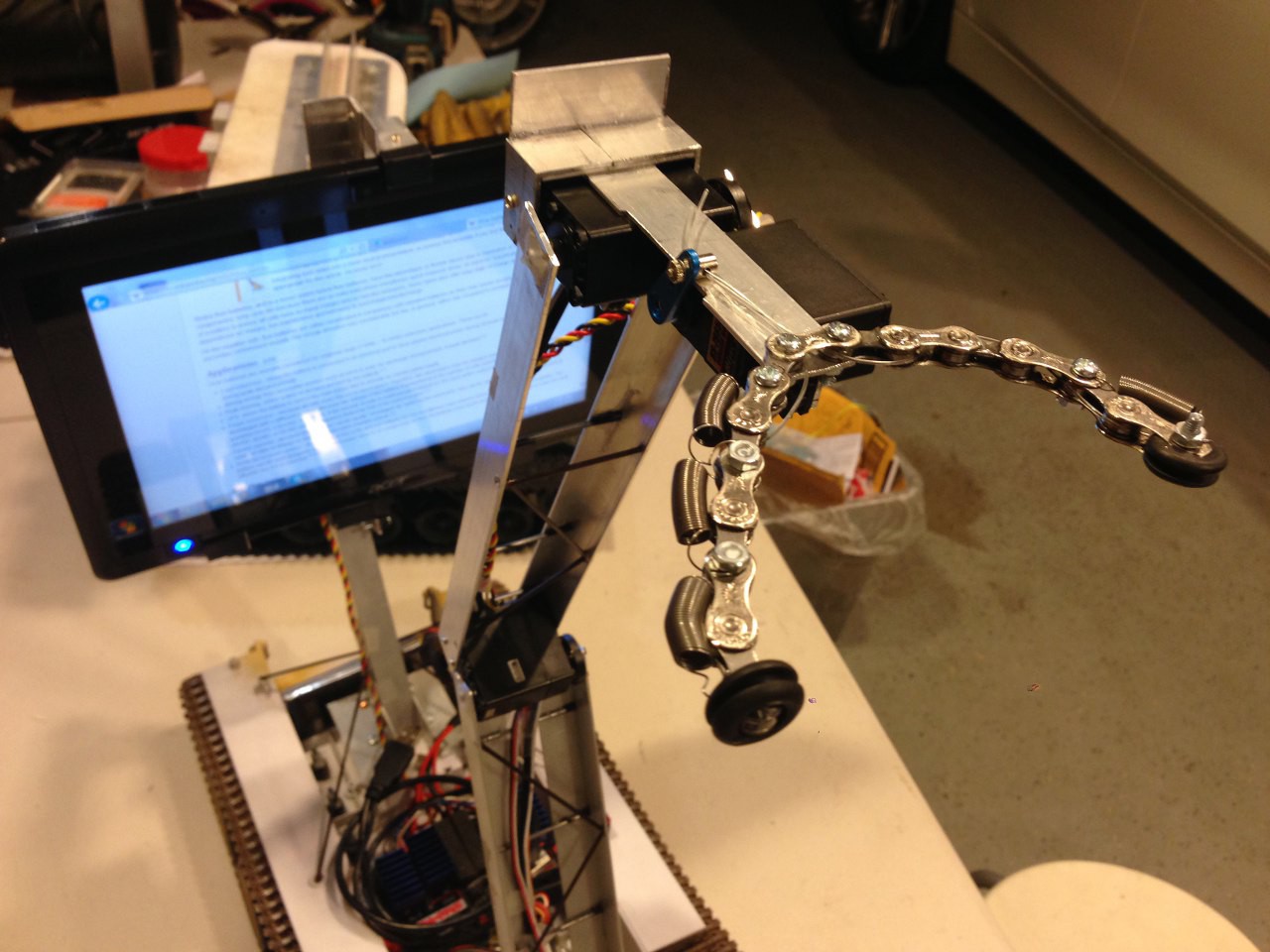
Final Testing:

oh wait a minute.......tomorrow is Monday again? NOooooooo :(
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.