 Dan Maloney
Dan MaloneyOK, let's get started. I'm Dan Maloney, I'll be the moderator today. I want to welcome everyone to the Hack Chat today, especially our host, @Will Cogley, who does some really cool stuff with animatronics.
Will, can you tell us a little about your background and how you got into this?
![]() Sure! I’m Will, and I make 3D printable animatronics designs and publish them open-source. I’ve had a lifelong fascination with robots, but also the human body and biology. My main long-running project is a biomimetic hand that I hope will have the same movement and functionality as a real human hand. I’d love to answer any questions!
Sure! I’m Will, and I make 3D printable animatronics designs and publish them open-source. I’ve had a lifelong fascination with robots, but also the human body and biology. My main long-running project is a biomimetic hand that I hope will have the same movement and functionality as a real human hand. I’d love to answer any questions!
 Here's the hand Will is referring to:
Here's the hand Will is referring to:
https://hackaday.com/2018/10/18/mechatronic-hand-mimics-human-anatomy-to-achieve-dexterity/
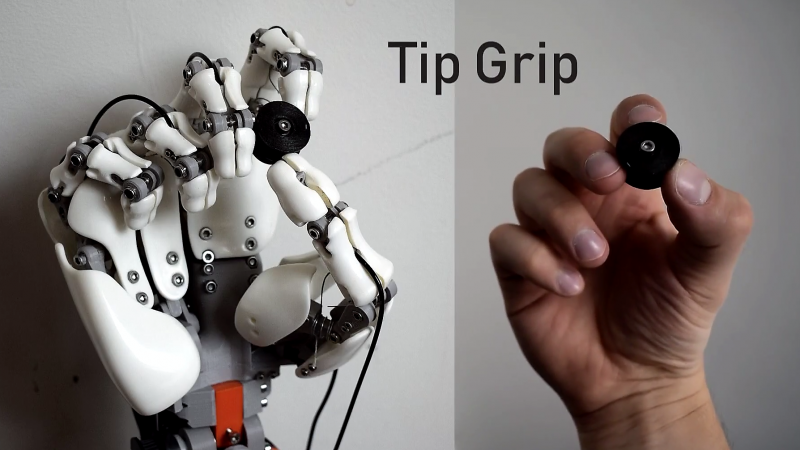
Mechatronic Hand Mimics Human Anatomy To Achieve Dexterity
Behold the wondrous complexity of the human hand. Twenty-seven bones working in concert with muscles, tendons, and ligaments extending up the forearm to produce a range of motions that gave us everything from stone tools to symphonies.
 When do you decide between stepper driven and servo-driven solutions?
When do you decide between stepper driven and servo-driven solutions?
 When do you think you will work on the hand again?
When do you think you will work on the hand again?
 wow, very impressive re. the hand!
wow, very impressive re. the hand!
![]() Most of my projects are done on a tight budget so I almost always use hobby servos. With my bionic hand I'm currently starting from scratch and trying to optimise each element, stepper motors are definitely something I'm considering atm!
Most of my projects are done on a tight budget so I almost always use hobby servos. With my bionic hand I'm currently starting from scratch and trying to optimise each element, stepper motors are definitely something I'm considering atm!
Nice
![]() I'm actually working on the hand right now (relatively speaking), I'm going to release a video about it hopefully next week
I'm actually working on the hand right now (relatively speaking), I'm going to release a video about it hopefully next week
![]() What is the biggest design challenge you face atm?
What is the biggest design challenge you face atm?
It's been a while since I watched the hand videos - remind me what technique was used to make the plastic pieces? They don't look 3D-printed.
![]() I'm trying to make my projects as accessible as possible so I'm using an FDM printer to make all the mechanisms and parts. Most of the parts in my new bionic hand design are so small they're kind of pushing the limits of what I can print reasonably so I'd say thats the biggest challenge I'm having right now.
I'm trying to make my projects as accessible as possible so I'm using an FDM printer to make all the mechanisms and parts. Most of the parts in my new bionic hand design are so small they're kind of pushing the limits of what I can print reasonably so I'd say thats the biggest challenge I'm having right now.
Can you see the hand being completed and if so what would be the next step after you have a fully functioning hand.
...and your preferred filament type? PLA? PETG? ABS?
![]() Yeah on that hand I used acetone-smoothing to get the ABS looking nice and shiny, it was actually kind of a nightmare since all the parts started to sag because of their thinness so I had to switch to hand polishing so they didn't totally collapse!
Yeah on that hand I used acetone-smoothing to get the ABS looking nice and shiny, it was actually kind of a nightmare since all the parts started to sag because of their thinness so I had to switch to hand polishing so they didn't totally collapse!
Wow, they came out great! Almost look injection molded. Gotta say, the hand looks bad-ass!
 or rather bad-palm
or rather bad-palm
Ba-dum tiss
![]() Yeah I think I'm going to have a good working prototype relatively soon, there will always be room for improvement I imagine, but I'd really like to work on some different control methods next. Originally I used a control glove, and now I'm considering motion detection. The main goal would be mind-control though haha!
Yeah I think I'm going to have a good working prototype relatively soon, there will always be room for improvement I imagine, but I'd really like to work on some different control methods next. Originally I used a control glove, and now I'm considering motion detection. The main goal would be mind-control though haha!
Gotta hand it to him. they look great
I'm sure other body parts will follow ;-)
 only if you walk backwards /ducks
only if you walk backwards /ducks
Have you ever looked at the vr hand thingy to controll it? I meant more like after a goo hand prototype would you consider mocing upwards and maybe develop an arm?
![]() I've used mostly PLA up until now, mostly because of my printer's limitations, but I've recently been using ABS and its proving to be much better for sliding surfaces
I've used mostly PLA up until now, mostly because of my printer's limitations, but I've recently been using ABS and its proving to be much better for sliding surfaces
Well, I mean that brings up a good point. Doesn't some of what animatronics attempts to do bleed over into prosthetic design? Like maybe drive it in terms of function and style?
Btw I really like you open sourcing stuff on your website. I can imagine if your hand prototype would be out many developers would start working on a vr styled controller.
I've seen some work with card-sized controllers with enough horsepower for image rec for things like rock-paper-scissors. Would be great to have a hand pose recognizer that drove the bionic hand.
![]() Yeah in the original design the forearm at least was a convinient way to house the actuators - in the new design I'd like it to be more functional and aesthetic
Yeah in the original design the forearm at least was a convinient way to house the actuators - in the new design I'd like it to be more functional and aesthetic
What are your favorite "default" servos?
 Is there a plan if this works well to create a kickstarter campaign to make injection molded kits?
Is there a plan if this works well to create a kickstarter campaign to make injection molded kits?
![]() Yeah there's definitely a bleed over between prosthetics and animatronics. I try to borrow from both worlds :)
Yeah there's definitely a bleed over between prosthetics and animatronics. I try to borrow from both worlds :)
![]() I bought a pack of 100 MG90s servos from aliexpress about 5 years ago and I haven't run out yet, I use them for just about all of my prototypes haha
I bought a pack of 100 MG90s servos from aliexpress about 5 years ago and I haven't run out yet, I use them for just about all of my prototypes haha
Could see an app for use as tele-ASL replicating a visual signer's poses for a blind/deaf person to read by feeling the bionic fingers move
 I like the hand drawn sketches in the video. I usally also start with those sketches before starting 3-D drawing it
I like the hand drawn sketches in the video. I usally also start with those sketches before starting 3-D drawing it
![]() Thats an awesome idea, thats kind of why I like the idea of open sourcing it because there's so many different applications
Thats an awesome idea, thats kind of why I like the idea of open sourcing it because there's so many different applications
![]() MG90s! I got a bunch too. Some of them are pretty crunchy though and over time the pots can wear out.
MG90s! I got a bunch too. Some of them are pretty crunchy though and over time the pots can wear out.
![]() Yeah they're not ideal, and almost definitely knock-offs.
Yeah they're not ideal, and almost definitely knock-offs.
How do you drive them? PCA9685?
![]() Thanks Bindhammer, yeah I put all my best sketches in the video but most of them are far rougher than those haha
Thanks Bindhammer, yeah I put all my best sketches in the video but most of them are far rougher than those haha
![]() Yeah I use a PCA9685 most of the time
Yeah I use a PCA9685 most of the time
What controllers you use to drive them?
Arduino/RPi ?
@Will Cogley, you'd probably like Eric Strebel's design videos. I know he'd love the look of your stuff: https://www.youtube.com/channel/UCFzr6ae9Uv-a_tCmHmkw49g
@Boian Mitov He uses an arduino
![]() Yeah I use an arduino, but some projects I've used a python console on my PC feeding into arduino
Yeah I use an arduino, but some projects I've used a python console on my PC feeding into arduino
I see CircuitPython in your future!
![]() Thanks Dan I was not aware of Eric Strebel
Thanks Dan I was not aware of Eric Strebel
![]() How do you manage power? I've seen servos cause low voltage and mess with micro controllers.
How do you manage power? I've seen servos cause low voltage and mess with micro controllers.
![]() Hmm I'm not familiar with CircuitPython, is it like a tiny raspberry pi?
Hmm I'm not familiar with CircuitPython, is it like a tiny raspberry pi?
![]() Well with the PCA 9685 driver you can power the servos separately to the arduino board
Well with the PCA 9685 driver you can power the servos separately to the arduino board
 it's just a stripped-down python that runs on microcontrollers - still like programming an arduino, but python insteap of C++
it's just a stripped-down python that runs on microcontrollers - still like programming an arduino, but python insteap of C++
Python env for multiple hardware platforms
![]() Interesting I'll definitely look into that
Interesting I'll definitely look into that
If you don't want to spend too much time on the software development, you can alternatively try Visuino ;-)
AdaFruit features it in a lot of their box projects
![]() To answer John's question, I usually budget 1A for each standard size analog servo. Digital servos can easily hit several amps.
To answer John's question, I usually budget 1A for each standard size analog servo. Digital servos can easily hit several amps.
@Will Cogley it's like you program Arduino, but with Python
![]() I've only recently started getting into python so that would probably be a really useful next step actually
I've only recently started getting into python so that would probably be a really useful next step actually
https://learn.adafruit.com/welcome-to-circuitpython/what-is-circuitpython

Welcome to CircuitPython!
You may have seen CircuitPython mentioned on the Adafruit site or on Discord. What is it? Why would you use it? Once you have a CircuitPython board, what do you do next? This guide has you covered from the moment you plug in your new board. Check it out!
Read this on Adafruit Learning System
 The hand mimic is great, how about some sensory feedback. Do you have something in mind. Like tactile feedback
The hand mimic is great, how about some sensory feedback. Do you have something in mind. Like tactile feedback
![]() Do you do any wheeled robotics? I am looking for a good skid-steer routine for the Arduino.
Do you do any wheeled robotics? I am looking for a good skid-steer routine for the Arduino.
![]() Personally, I use VSA for my storytelling robots: https://www.brookshiresoftware.com/vsa_overview.htm
Personally, I use VSA for my storytelling robots: https://www.brookshiresoftware.com/vsa_overview.htm
 When I use servos they always have jittering , random small motions on powerup, is that normal? I tried many ways to avoid this, but with no help...
When I use servos they always have jittering , random small motions on powerup, is that normal? I tried many ways to avoid this, but with no help...
![]() Yes sensory feedback is definitely something I'd be interested in. I've seen a glove which used servos to do it but very clunkily. I had thought maybe tiny solenoids ?
Yes sensory feedback is definitely something I'd be interested in. I've seen a glove which used servos to do it but very clunkily. I had thought maybe tiny solenoids ?
![]() You said you were looking at motion detection as the next input control setup. Were you looking at something like a leap motion controller or something else?
You said you were looking at motion detection as the next input control setup. Were you looking at something like a leap motion controller or something else?
Some quick&dirty systems just use haptics from phone buzzers to stim the fingers
I was trying to figure out a way to mimic pressure sensing, something like those pressure mat things
![]() Yeah leap motion is exactly what I was looking at, it looks like it has all the degees of freedom I would need
Yeah leap motion is exactly what I was looking at, it looks like it has all the degees of freedom I would need
![]() Oooh for feedback, you could totally use an ultrasonic array.
Oooh for feedback, you could totally use an ultrasonic array.
![]() the company leapmotion merged with manufactures those
the company leapmotion merged with manufactures those
![]() Maybe build your own whisker sensor? https://ieeexplore.ieee.org/abstract/document/1041717
Maybe build your own whisker sensor? https://ieeexplore.ieee.org/abstract/document/1041717
Use a strain gauge on the bionic hand and map it to stronger vibration in finger vibrations?
I wonder if little piezo transducers in the fingertips of the gloves could be driven to provide some haptic feedback. Your fingertips are pretty sensitive, after all.
Leap motion is fine but hand should always be parallel to it, or it lose tracking for some seconds, I had used it for a while
![]() When I make very active characters, I tend to strip a lot of gears. I started using servo savers to limit torque and that seems to help. Any thoughts on these?
When I make very active characters, I tend to strip a lot of gears. I started using servo savers to limit torque and that seems to help. Any thoughts on these?
![]() yes piezo might be a good idea. How would an ultrasonic array work?
yes piezo might be a good idea. How would an ultrasonic array work?
![]() I had a theory for a long time that each finger would have an oil-filled bladder to measure the pressure/force put on the finger.
I had a theory for a long time that each finger would have an oil-filled bladder to measure the pressure/force put on the finger.
@Louis I have a bunch of different wheeled robots, and maybe able to recommend you suitable one. Will send you private message...
But the response of oil flow might be slow for real time
![]() Interference patterns of ultrasonic waves create pressure that you can sense on your hand
Interference patterns of ultrasonic waves create pressure that you can sense on your hand

Synthetic 'Skin' Is Bringing a Sense of Touch to Virtual Reality
Virtual reality's ability to create artificial worlds has come a long way in recent years. Now new technology could make th ose worlds even more realistic by simulating one of the most crucial ways in which we experience things: touch.
Can the ultrasonic thing be scaled to a glove
![]()
https://www.ultraleap.com/haptics/

Haptics | Ultraleap
Using our patented algorithms, the ultrasound speakers are triggered with very specific time differences. These time differences mean the ultrasound waves arrive at the same point in space, at the same time.
![]() that's really cool but not very portable I'd imagine
that's really cool but not very portable I'd imagine
![]() @yawar.saeed it's more of a no contact approach
@yawar.saeed it's more of a no contact approach
![]() For sensing, I'm working on shape sensors that might be ideal for controlling animatronics: https://www.bendshape.com/
For sensing, I'm working on shape sensors that might be ideal for controlling animatronics: https://www.bendshape.com/
StackPath
![]() yea, probably not very portable. What are the use cases you're looking at?
yea, probably not very portable. What are the use cases you're looking at?
![]() Paul they look great, I had planned on using bend sensors the first time around but they didn't fit within the university's budget unfortunately haha
Paul they look great, I had planned on using bend sensors the first time around but they didn't fit within the university's budget unfortunately haha
![]() We will be releasing dev versions later this year...
We will be releasing dev versions later this year...
I was trying an approach of defining zones in the hand and fingers because brain can autocorrect the rest
![]() Not entirely sure Matt, I just like the idea of things being wearable haha
Not entirely sure Matt, I just like the idea of things being wearable haha
![]() Will you add skin or leave it exposed?
Will you add skin or leave it exposed?
![]() Nah I like the robotic aesthetic
Nah I like the robotic aesthetic
![]() but actually thinking about it a silicone skin could really help with grip
but actually thinking about it a silicone skin could really help with grip
Will be interesting if the surface of the hand can be covered with a touch/pressure sensitive layer
![]() Enough realism with the heart huh? :-p
Enough realism with the heart huh? :-p
Have you tried grabbing an egg? It something soft to optimise handling
![]() print with nijaflex instead of abs
print with nijaflex instead of abs
![]() Yeah my first thought was just to use flexible filament for the outer shell parts, probably wouldn't be as nice and shiny though
Yeah my first thought was just to use flexible filament for the outer shell parts, probably wouldn't be as nice and shiny though
![]() what about a reverse capacitive touch? have the same mesh on the hand instead of the thing being touched?
what about a reverse capacitive touch? have the same mesh on the hand instead of the thing being touched?
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.