 deʃhipu
deʃhipuIn which we learn why it's much easier to build small robots than large ones.
The Cube Law
A lot of reasons for making your robots small comes from the cube law. This law gives you the relation between the size of an object and its volume (there is also the square law, that gives you the relation between the size and the area). It says that as your robot grows in size, its volume will grow proportionally to the third power of that size (also called cube, hence the law's name). Consider the following example:
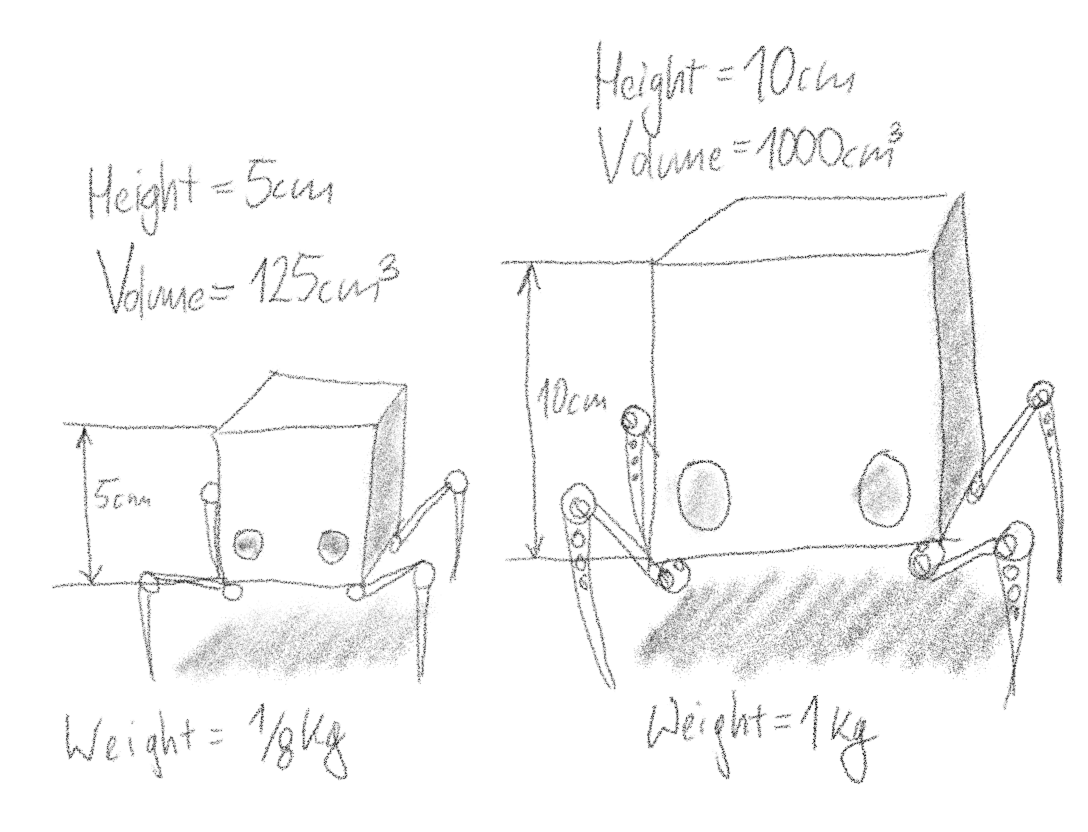
(I'm assuming that in both cases the average density of the robot doesn't change, that is, that it's not almost empty in the second case. As we will see later, that's quite accurate, or even optimistic.)
Actuator Strength
"Actuator" is a fancy name for whatever makes your robot move: servo, motor, artificial muscle, memory metal, hydraulics, pneumatics, etc. As the size and weight of your robot grows, so has to the strength of the actuators it uses.
For instance, consider a servo. Its strength (in this case called torque) is usually expressed in kilograms (of force) times centimeters, or newton meters. If a servo has 1kg×cm of torque, it means it can lift 1kg of weight on a 1cm long lever. Since the levers scale linearly, it means it could also lift 0.5kg on 2cm long lever, or 2kg on 0.5cm long lever, etc. You can see already that if you make the robot's legs twice as long, you will need twice as much torque. But that's assuming that the weight remains the same. From the cube law you know, that the weight is going to grow fast, so in reality larger robots will need a lot more torque.
But there is another thing. The smaller the servos, the lighter and cheaper they are. Sure, the torque also gets smaller, but not nearly as fast. Consider those two example servos:
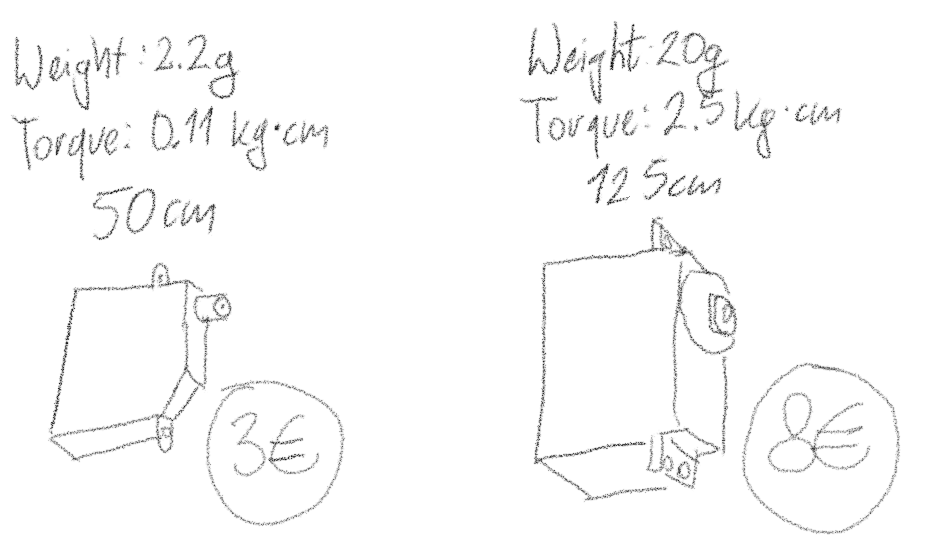
As you can see, the smaller servo can raise itself on a lever half a meter long! The larger one, almost 10 times heavier and over 20 times stronger, can only do 125cm. And it will be similar with any other parameter: price, speed, amount of current needed, etc. At some point the parameters will be so bad, that you will have to switch to hydraulics.
Material Strength
It's not just the actuators that need to be stronger. They are connected to the structural elements, that have to bear all that force too. And thanks to the cube law, it doesn't suffice for them to be just longer and thicker -- they actually have to be made from stronger and lighter materials.
Stronger materials are harder to machine and generally work with. You can no longer get away with hot-gluing parts together: you will need nuts and bolts, and possibly also special mechanical design. And you will need specialized tools.
And when you finally get your robot together, it will be very fragile. Why do you think all those large robots in laboratories always operate with a safety line hanging from the ceiling over them? That's because if they fall down, they will smash into pieces. The materials they use are strong enough to hold them together, but not strong enough to survive a fall.
On the other hand, my smallest robots survived repeated falls from my desk to the floor without even a scratch. If you make a robot the size of a cockroach, you can drop it from the roof of a building. It will simply not gain enough speed falling through the air to damage it on impacting the floor.
Inertia
So you finished your large robot, and now you are programming it. For a start, you just make the limbs move straight to their destinations and stopping once they get there. Your robot falls, the limbs break off, the servos strip gears and there are huge spikes of current drawn from the battery. What happens?
Well, you cannot just move a heavy object with high speed and then have it stop instantly. Inertia will make it keep on moving, and the servomechanisms will need to do a lot of extra work (and endure great forces of stress) to stop it and move it back where it belongs. That also applies when moving the whole body of the robot while walking -- your effective Zero Movement Point no longer coincides with the center of mass of your robot. You have to start taking the speed and acceleration into consideration in your motion planning, and thus all your movement equations become second degree differential equations without a closed-form solution. Yay!
On the other hand, if you keep the robot small, all its elements light and the servos have abundance of power, you can pretty much ignore inertia and get away with writing much simpler code that only takes into account the current positions of the limbs.
Safety
So you think you have the budget, you have the materials and tools, you have the programming expertise and strong servos to handle the inertia, what could possibly happen.
Just watch this video by Trossen Robotics:
Strong servos, larger batteries, high currents, long reach of the limbs, high movement speeds -- it all means trouble. You will need safety measures. Force stop buttons, one on the robot itself (hardware, brutally cutting the power), and one remote (so that you don't have to chase your robot through a hole in made in the wall). Suspensions mechanisms. Safety gear for you to wear. Fire extinguisher capable of containing a LiPo battery fire. Circuit breakers. Someone to check periodically if you are trapped under your robot's weight...
It's all extra work, extra cost and extra risk. Why take it, if you can instead have a robot the size of a hamster that behaves funny when something goes wrong, and tickles instead of crushing your bones?
Convenience
I left the most important reason for the end. Small robots are convenient.
You can work with them directly on your desktop, connect them to your computer, adjust easily with just a screwdriver. You can store them in your drawer. You can recharge them from your phone charger. You can take them with you to conferences and workshops. You can fly with them in your carry-on baggage (as long as they don't have anything that looks like a clock on them). When something goes wrong or breaks, you can simply pick them up and fix.
Not so easy with larger robots. You will need to test them on the floor, in a garage or even outside. You will need a complete suite of tools to work on them, and a dedicated storage space to keep them. Special battery charger. Taking them anywhere involves careful packaging or even loading onto a car. For flight, you have to remove anything that is sensitive to low temperature and pressure, as it's going to go in the check-in baggage. Also be prepared to have to re-fasten all the screws on it that came loose due to vibrations. When something goes wrong or breaks, you have to call the mason to fix your house...
Conclusion
Make your robots as small, as practically possible.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
so yes, comparing a robot cost XX per cube, just a like comparing building a house you price it by the square footage.
Are you sure? yes | no
Except it's not like that. If it's larger, then you have to use stronger (and more expensive) materials and stronger (and more expensive) actuators, so it's much more.
Are you sure? yes | no
"If you make a robot the size of a cockroach, you can drop it from the roof of a building. It will simply not gain enough speed falling through the air to damage it on impacting the floor."
Is this just hyperbole? or has it been tested? ;)
Also, great article.
Are you sure? yes | no
It has been tested, but not by me. They did it on actual insects.
Are you sure? yes | no
While I agree in principle with what you're saying, your servo numbers are a factor of 10 off.
20g * 12.5cm = 0.25kg*cm.
That servo will lift itself on a 125cm lever (if you've played with a 20g servo you know that they are way more powerful than a poxy 20g at 12.5cm)
Are you sure? yes | no
Ooops. Calculations, how hard can they be. Thank you for catching this, I fixed it.
Are you sure? yes | no
Nice article!
It reminded me of the only issue of Make Magazine I ever bought, the volume 39 with Grant Imahara and "This robot almost killed me" on the cover. http://makezine.com/2014/06/03/imahara/
Are you sure? yes | no
Thanks for the article, it's fascinating!
Are you sure? yes | no
your thinking apply to drones not robots
real robot does not exist yet only drones and automated tools
Are you sure? yes | no
I think that in fact it applies to anything mechanical, be it a remote-controlled toy, a semi-autonomous drone, or a fully autonomous robot. Of course your comment begs the question about your personal definition of "real robot", but I'm afraid that would quickly devolve into a "no true Scottsman" (https://en.wikipedia.org/wiki/No_true_Scotsman). However, I am curious about which aspect of a "true robot" would make it immune to the cube law or inertia?
Are you sure? yes | no
for inertia a good use of gravity and lever law should be enough (as making the motor go down while what it move go up for example)
for cube law retractables members + future materials ;)
a real robot is evolutive and can change of form for what it want...
Are you sure? yes | no
A counterweight, which I think is what you mean, helps with weight of things, but not with their inertia. Weight is the tendency of things to fall down to ground. Inertia is the tendency of things to keep moving at constant speed once they have been put to motion. Adding more mass to the system will ever only increase the inertia, never lower it.
No idea how retractable members help with the cube law, as the weight, which is the problem, remains constant whether they are extended or retracted. Future materials are some hope, but they are limited by the laws of physics too, and they won't be cheap.
Evolving robots do exist, as well as ones that can change form in some way or other, but they are hardly useful for anything other than research.
Are you sure? yes | no
Great writeup! Thank you!
Are you sure? yes | no
Nice article. I'm also a fan of small robots! :D
Are you sure? yes | no
Nice writeup, and good points... I definitely prefer my robots to be small!
Are you sure? yes | no
LOL @ youtube title abreviation!
Are you sure? yes | no
Saw that too haha
Are you sure? yes | no