 jeff
jefflsm6ds3, l3gd20, mpu6050, and bmi160 were attached to a small robot.
the gyros were read at 1msec intervals. the robot started turning at time=655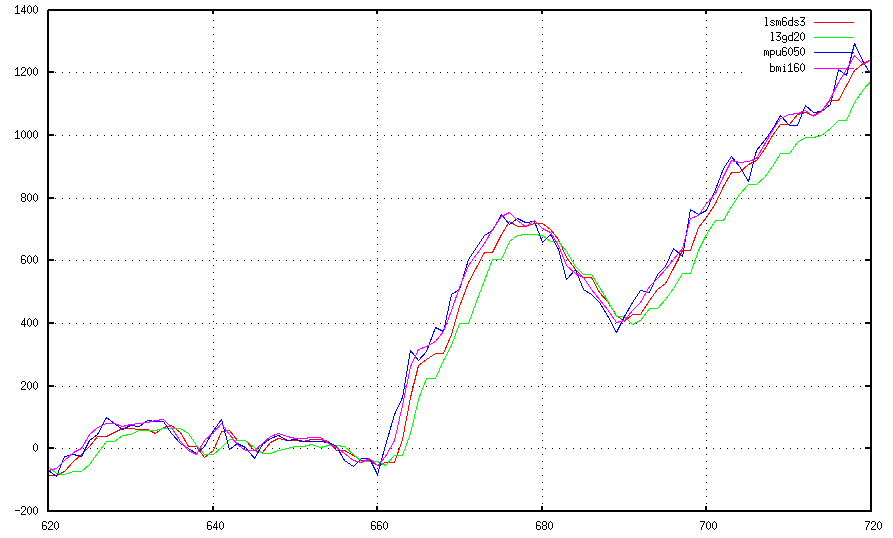
at the end of the turn, the total angle measured:
lsm6ds3: 179.44
l3gd20: 173.10
mpu6050: 179.66
bmi160: 178.53
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.