 Patrick Joyce
Patrick Joyce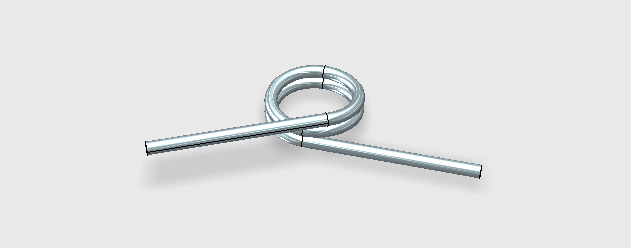
The three main issues i'm working on at the moment are: the wrist joint, the forearm layout, and the thumb. I realised last week, that I couldn't work on the hand in isolation anymore, I would have to design the forearm and hand together. I hadn't done this from the start, because my wheelchair mounted computer, while powerful for its type, is puny and inadequate for CAD work. Its all I have however, so i've made do. I'm designing the arm in small sections, that my computer can cope with.
Raimi has a partial forearm, so the space between the tip of her
forearm, and the base of the hand, is the space i'll have to fit
three actuators and the wrist joint into. It is 12cm long. Which
isn't very big. So to maximise the space in the forearm, i've
decided that the finger return springs would be better off in either
the palm, or the fingers themselves. After a lot of experimentation
(with the help of my carers), I have arrived at an excellent solution. I'm going to
make my own springs that fit inside each finger joint. I knocked together a rough, proof of concept, prototype, with the help of my dad. Since then i've redesigned the finger joint to suit. Made a jig for the springs, and ordered more spring steel wire.
The picture is
a CAD model i've made to help explain to my carers, what I want them
to make. I'll post a video when I get the first finger working –
hopefully tomorrow....
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.