 Sergey
SergeyOK, figured out the email part. Wasn't easy. I'm using Azure VM with dovecot as IMAP server and sendmail as smtp, without encryption - this is not secure, but I've prohibited any relaying and I'm using non-standard ports, and authentication. So, I think for my purpose of collecting telemetry solution is good - I run the VM when I need telemetry and stop it when I don't, Azure looks quite cheap even with external IP.
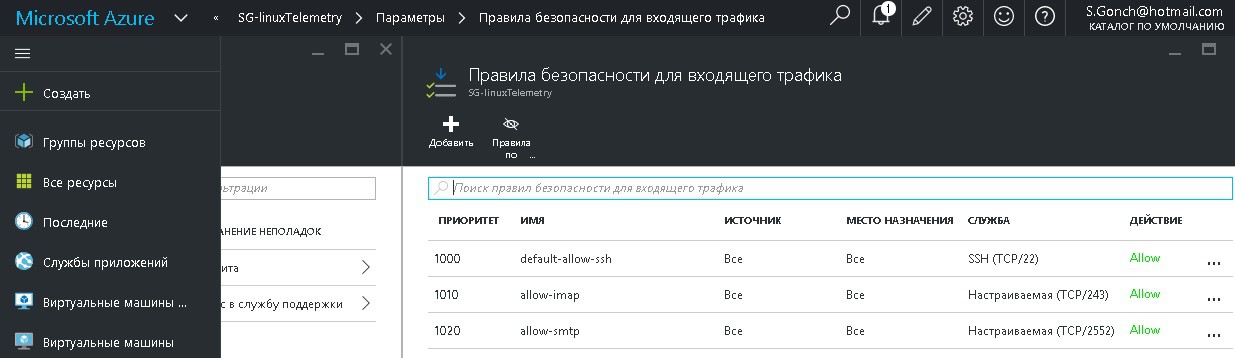
Plus I'll be able to check mail server logs to know if device tried to initiate a contact - something is not possible with public email servers.
Now I need to conenct something real, planning to add barometer, magnetometer, accelerometer and gyro (all via I2C conencted to the Atmega on the board), so that inertial coordinates of the device can be calculated. This is the first step - the next would be to calculate them on-board and send only coordinates, without GPS ;)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.