 ken.do
ken.do*note* The longer nubs may not be necessary any more due to tighter printing tolerances. If the shorter nubs work, use them in place of the longer ones.
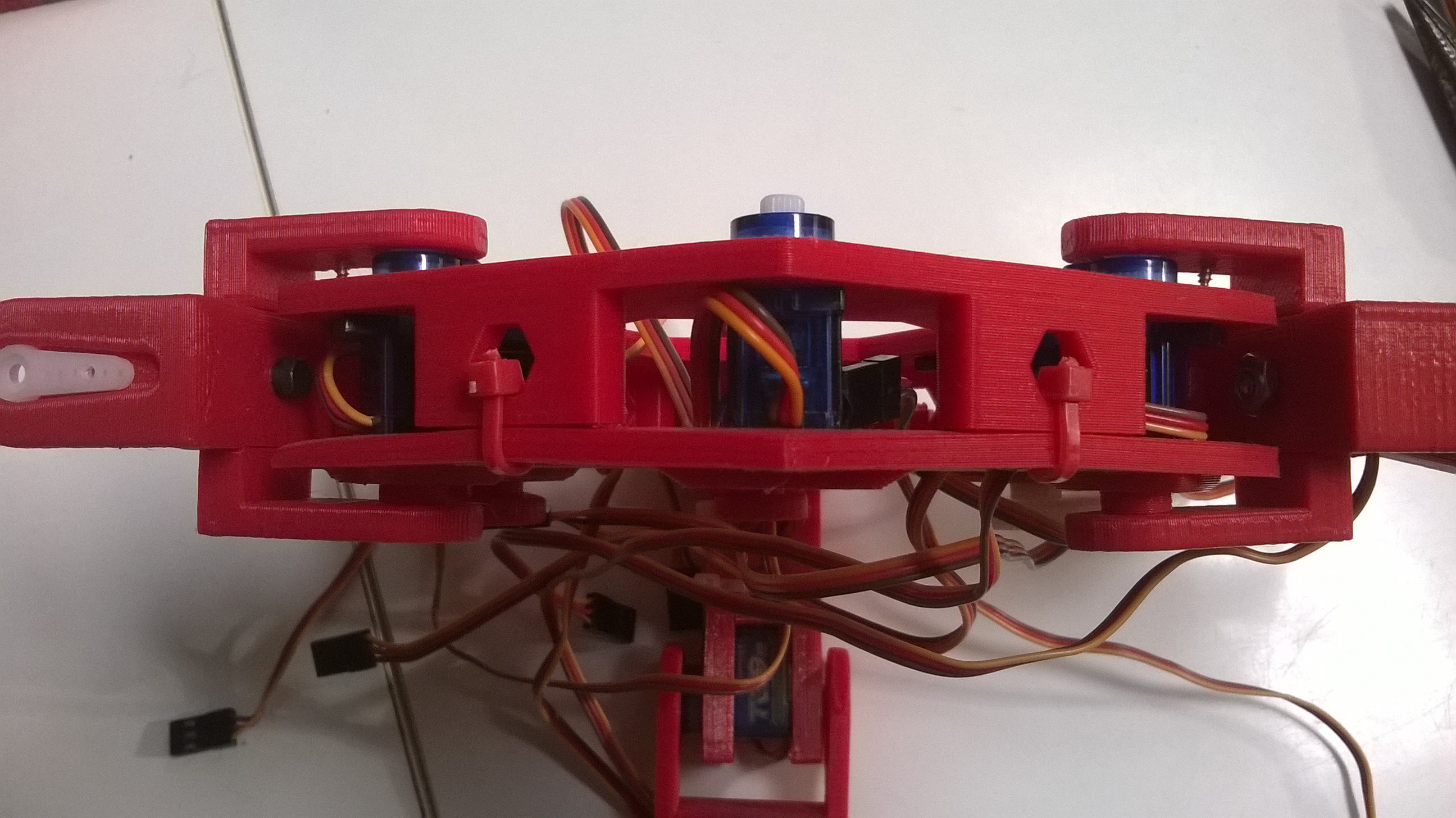
1. Assemble the main body frame:
To assemble the main body frame, servos are inserted in each of the 6 receptacles on one half of the frame and then sandwiched with the other half. Secure the halves with zip ties, or screws.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.