 ken.do
ken.do6. Attach foot to mid leg
Using the shallower nub, follow the procedure for attaching the mid leg to the hip. it is important that the rounded part of the foot is up relative the top of the main body.
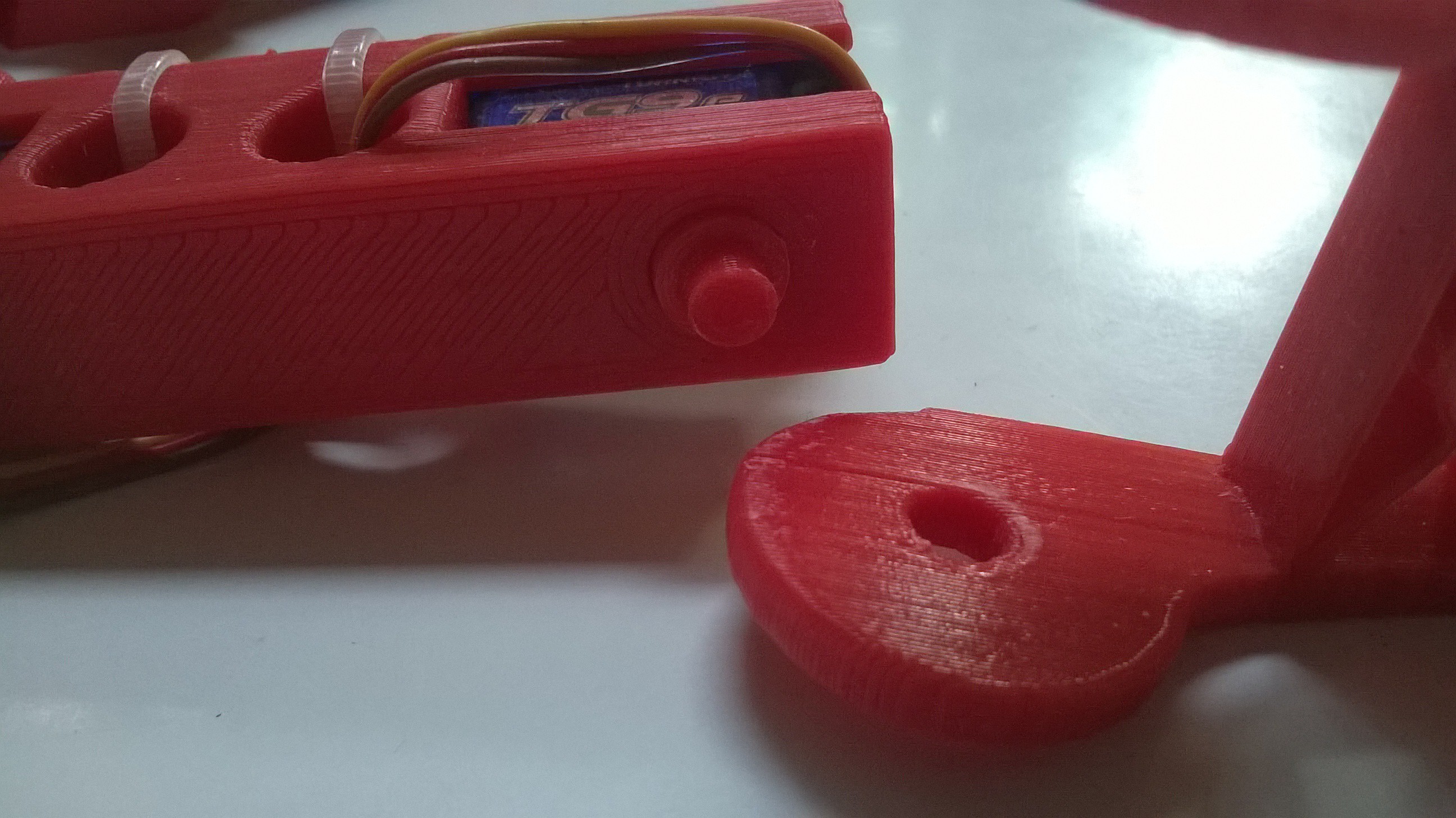
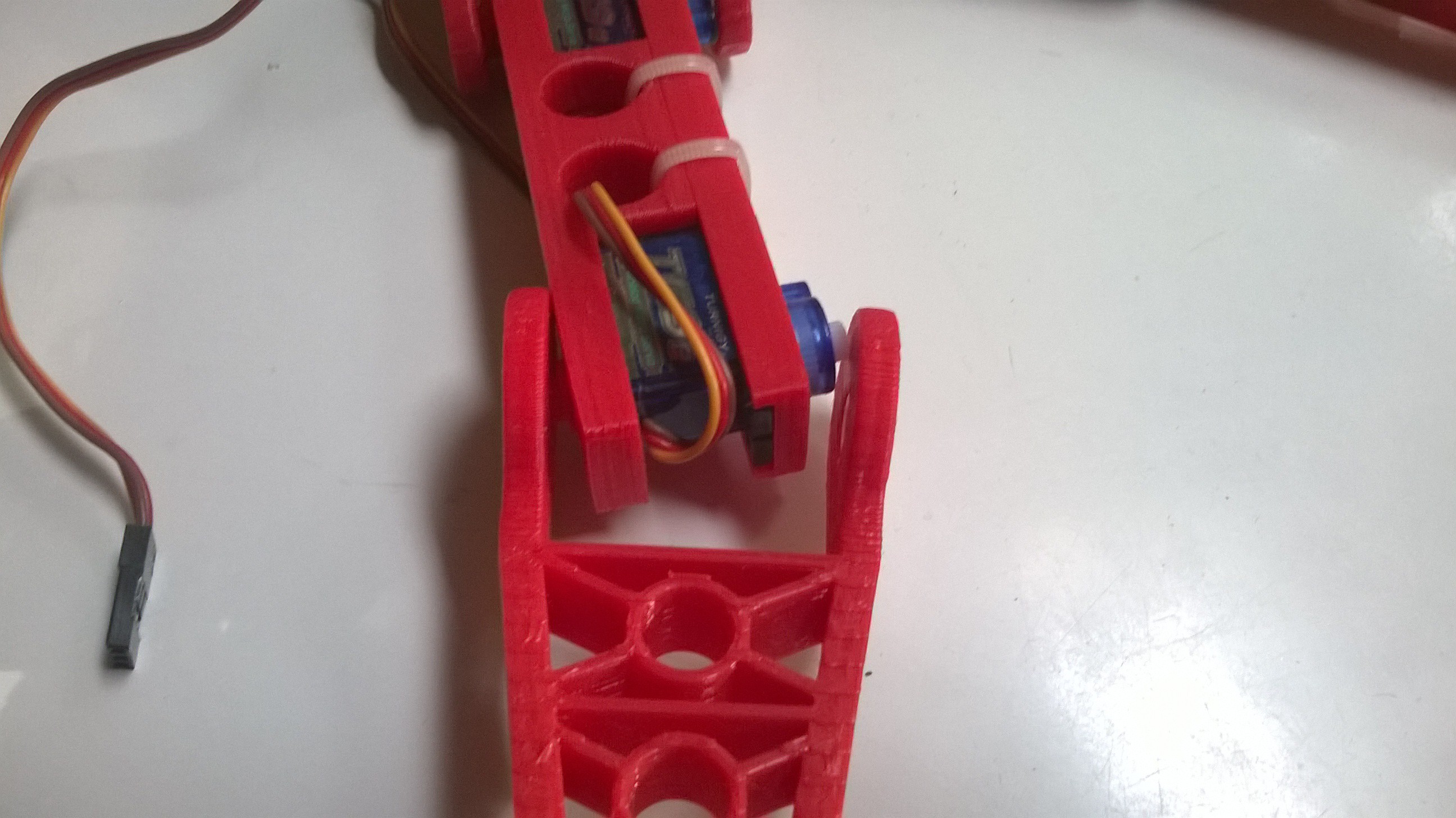
Again, seat and secure horn to both servo and foot.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.