 Daniel
DanielMain application screen mockup
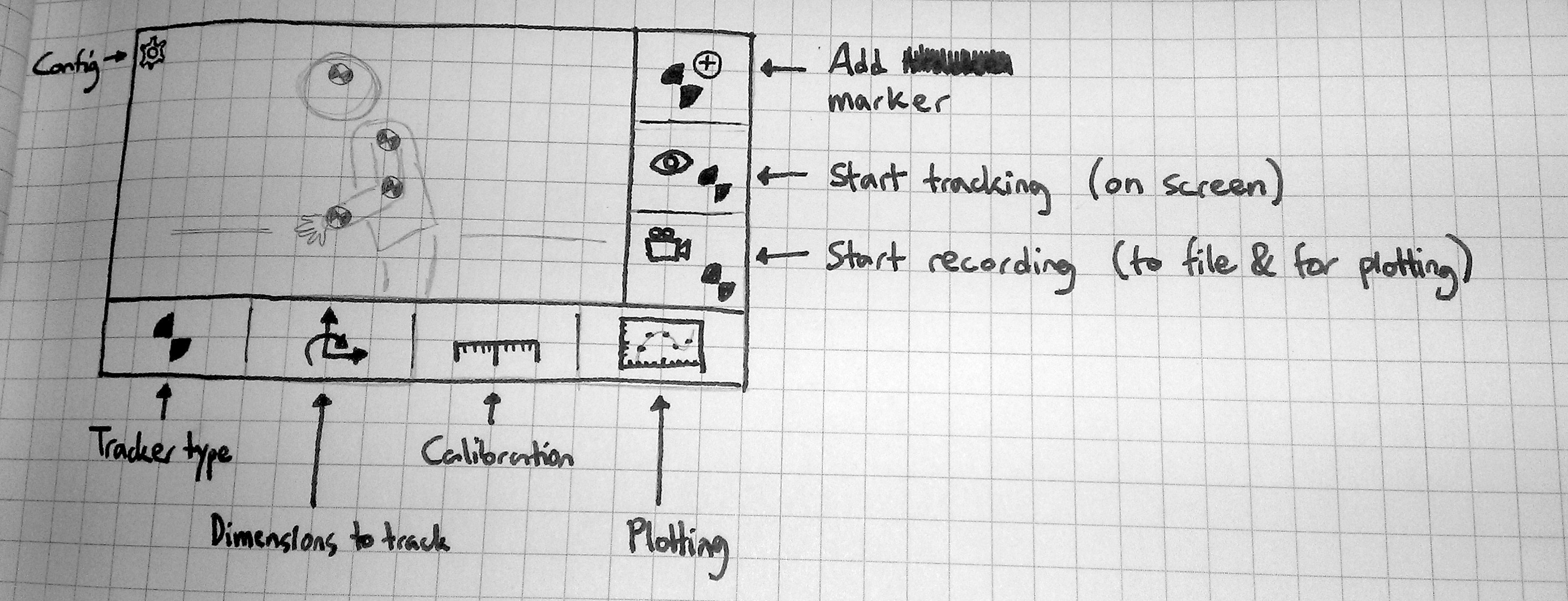
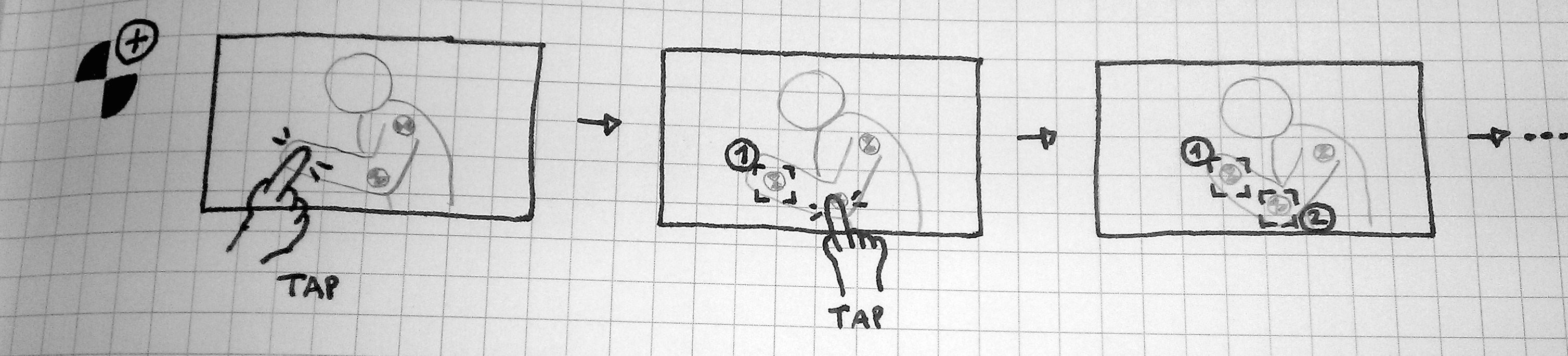
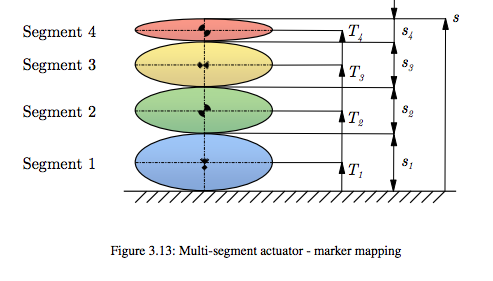
Adding a marker to the scene
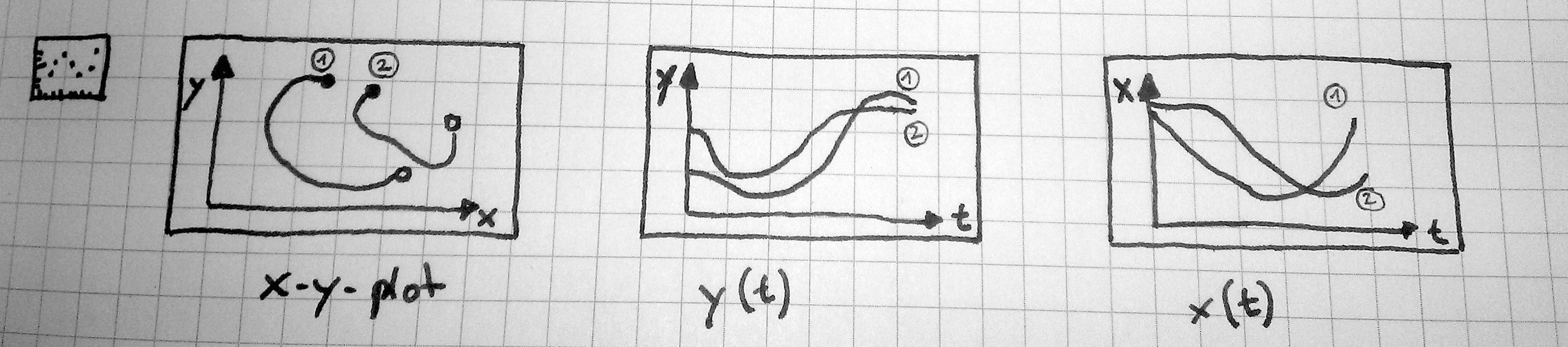
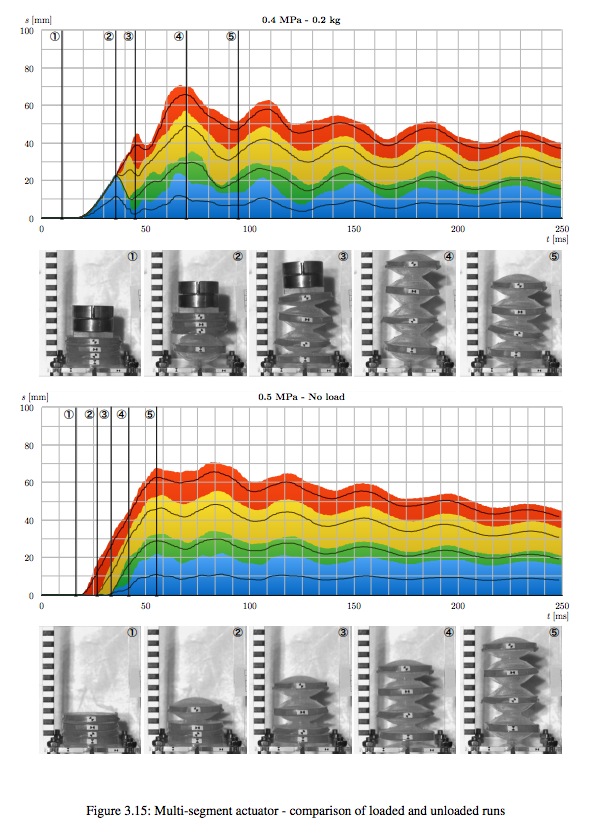
Visualizing the data, as an x-y-plot or over time
Additional feature ideas:
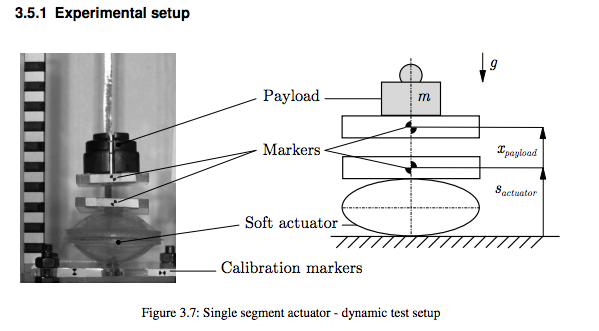
- Special "calibration markers" within a known distance from each other for scale calibration
- Lens distortion feature, initially for commonly used lenses (e.g. iPhone camera)
- The data can be exported to CSV or other easy to read formats.
- The analysis can be performed either on a live video stream (e.g. smartphone camera) or on an existing video file.
- A movie can be exported with markers and data overlaid.
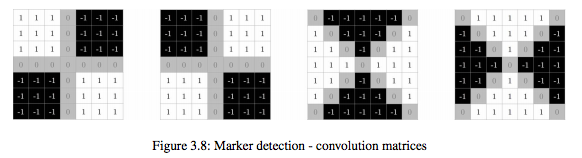
As an engineer working in Machine Vision, I realize marker tracking in the real world is a huge challenge for this kind of algorithm. However, I was surprised at how robust even the crappiest implementation of my convolution matrices was, written with little know-how of the subject. While the emplyed method did not yield sub-mm accuracy, it provided us with a straightforward way to (at least qualitatively) assess our data. And that's good enough a lot of the time!

 amitash nanda
amitash nanda
 rlsutton1
rlsutton1
 Les Hall
Les Hall
Bom dia
Meu nome é Marcus Pigato e sou do Brasil.
Gostaria de verificar a possibilidade de fabricação do item para comercialização aqui.
você está interessado?