 PointyOintment
PointyOintmentThe other day I was at Protospace for our weekly mini open house. Protospace happens to be where I have my collection of color filter wheels (on my member shelf), and I intended to make a mockup that night. However, our magical wish-granting free shelf made it even better.
That night, several pairs of active shutter 3D glasses had appeared on the free shelf, and proved quite popular. I had been thinking that my device would need shutters of some kind to eliminate motion blur as the filter wheels spin (analogous to the shutter in a movie projector eliminating motion blur as the projector switches frames), and these LCD shutters will probably do quite nicely. They work the same way as an auto-darkening welding helmet, but have a separate shutter for each eye, which (for 3D viewing) alternate in sync with the image being displayed on a screen to produce the 3D effect.
I, however, will be closing and opening the shutters together rather than alternately, because the filter wheels will spin in sync with each other. My plan is to remove the shutters from the glasses and mount them and the filter wheel assemblies together onto a head harness of some kind. This mockup (color filter wheel assemblies taped to shutter glasses) was pretty heavy:


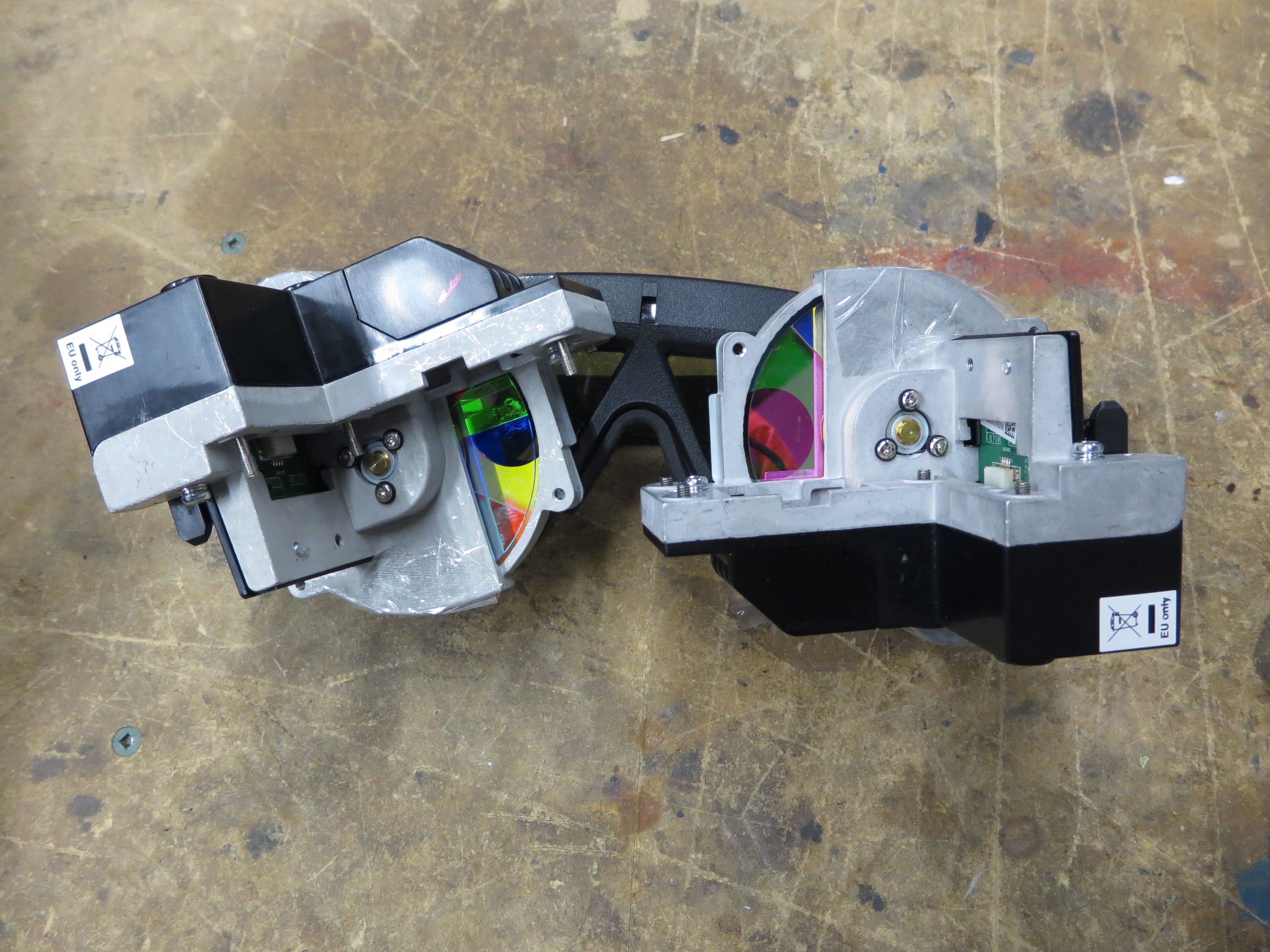

At some point I might design my own color filter wheels for this project (especially with a larger radius to increase the field of view), but I want to experiment with these ones more first (both because I already have them, and for an exciting reason to be explained in an upcoming project log entry). As well, I found out who supplied them to the free shelf the other month, and he said he can get me more if I want them. I already have a bunch, but if this proves popular among local colorblind people, maybe I'll use those to make them some goggles to try out before getting custom ones made.
For initial testing, I have to figure out a good way to control the filter wheels to go to one filter on command and stay there until the next command. They use brushless motors, which I can probably set up to microstep if necessary (?). This, however, is going to require me to investigatively disassemble one of the assemblies again, further than I did last time, because I was unable to see and trace out the entirety of the PCB then. The internal circuitry is pretty simple, though. I think I'll be able to control it with a simple microcontroller or something, and because the motor is so low-powered-looking, I probably can just use some transistors to drive it instead of using a brushless ESC (which would be more difficult to control for static positioning).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.