 M. Bindhammer
M. BindhammerUsed a coping saw again to cut out the bottom and top plate of the differential wheeled robot base. No human walking. Murphy is using a kind of wheel chair to move forward - or in any other direction. A plain old differential wheeled robot.
Material 2 mm aluminum sheet. Cut out the two parts separately, then screwed them together, grinded and sanded them till they matched perfectly.

Holders for the HC-SR04 ultrasonic sensors, which are placed on the three front and back edges of the bottom plate, will be 3-D printed as it is quite difficult to drill 18 mm holes accurately with a simple drill press I have. There is always a lot of shift at such big drilling diameters.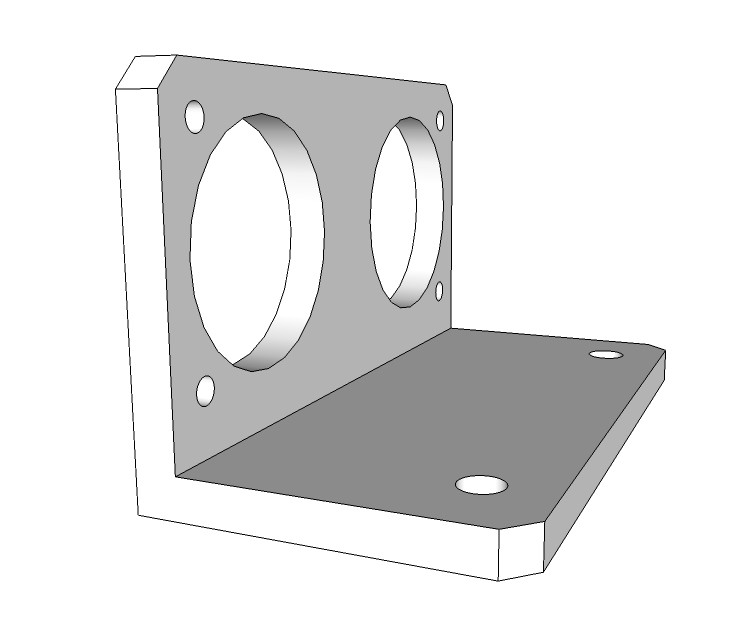
Robot will move slow, because organic chemistry is usually slow (beside explosive chemistry and such). Slowness of organic reactions is a necessary condition for a longer life span of organisms. We human beings are driven and controlled by organic processes beside a little electrochemistry. Suppose digestion of a meal would be according to inorganic reactions finished in a couple of seconds or minutes. A few hundred calories would be released at once, and a part of the muscle apparatus would positively burn under the immense heat or damaged otherwise. A short time after cooling occurred the organism would suffer from hunger again and new food intake would be needed.
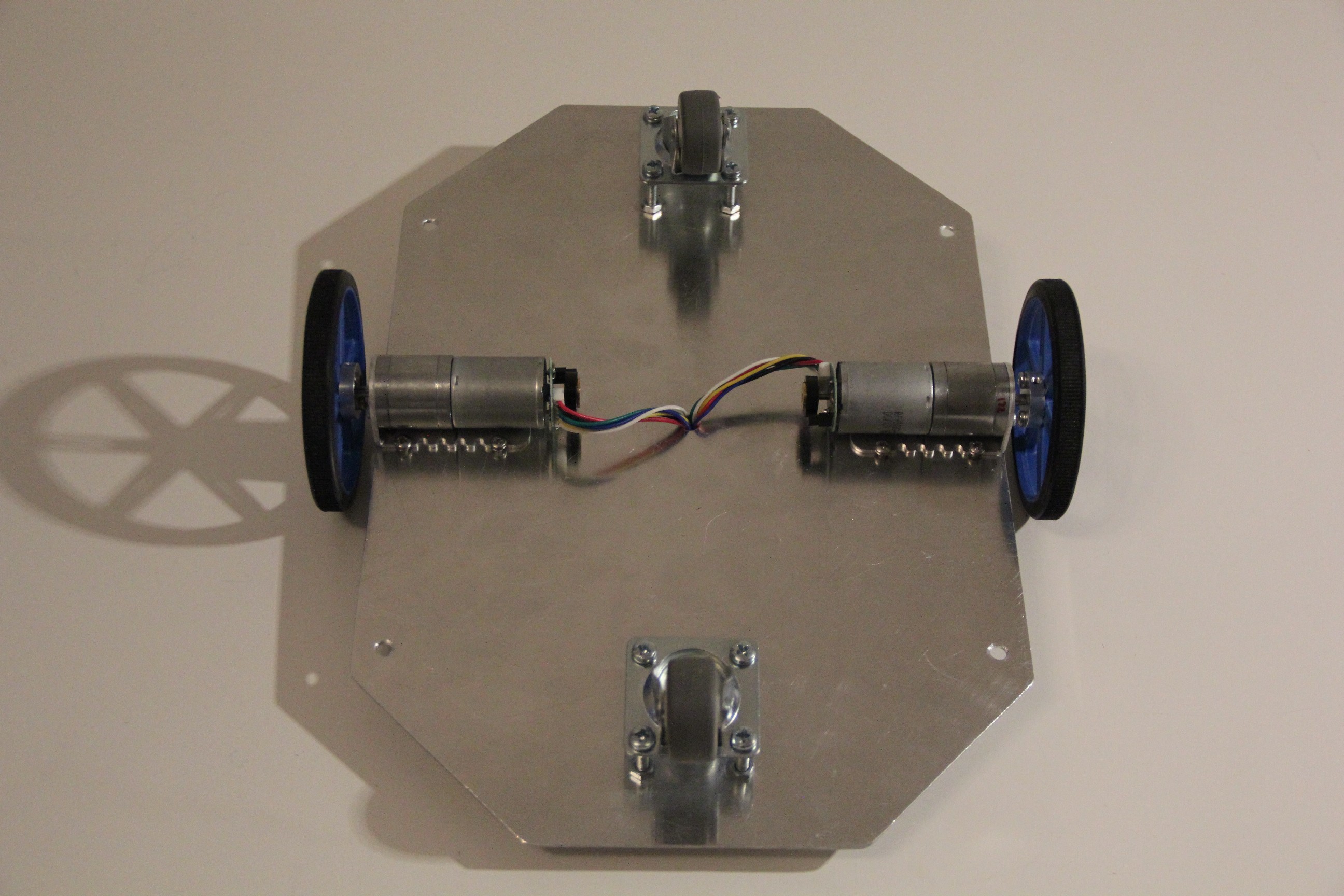
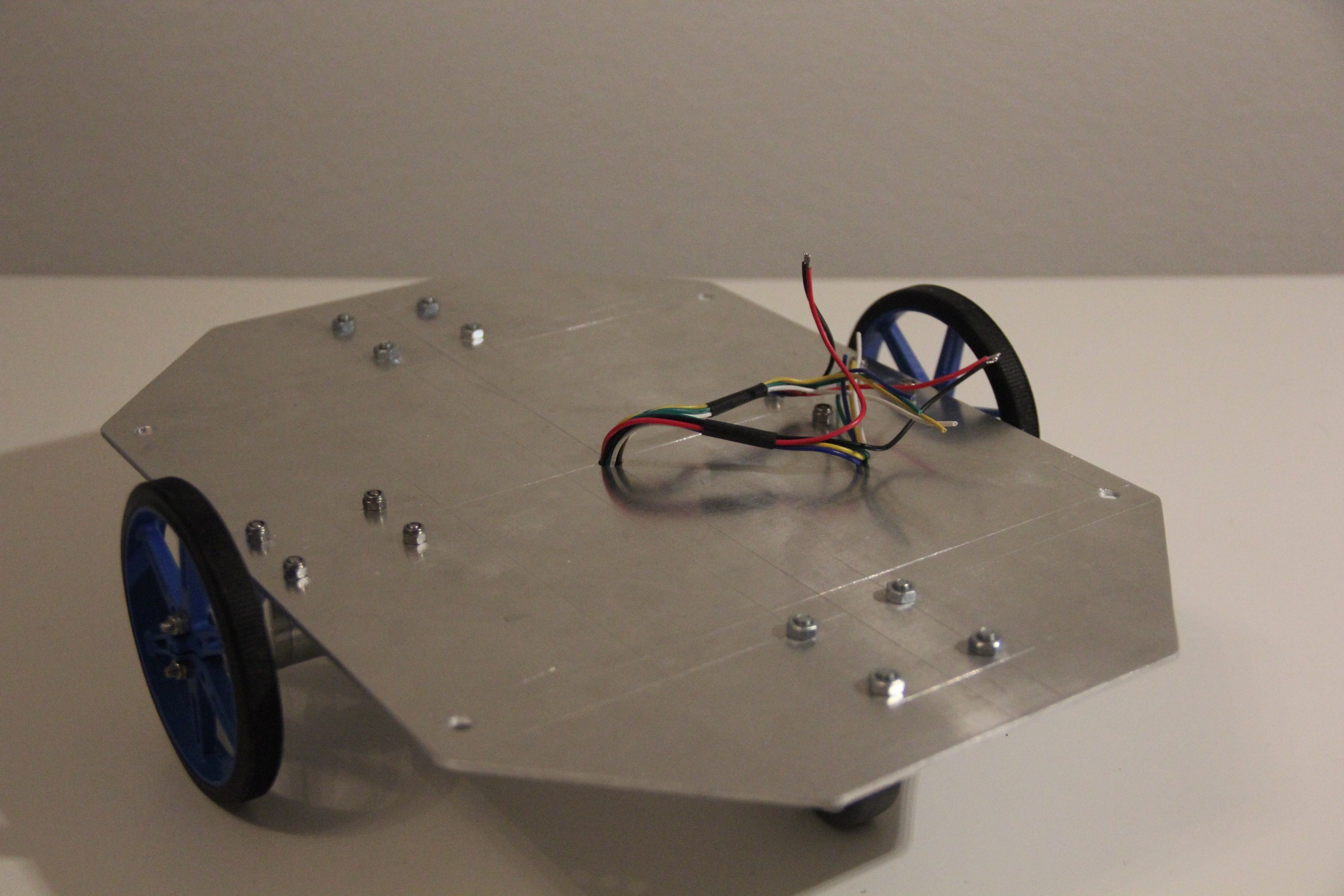
Robot torso mounted on the upper plate, enjoying the beauty of an orchid: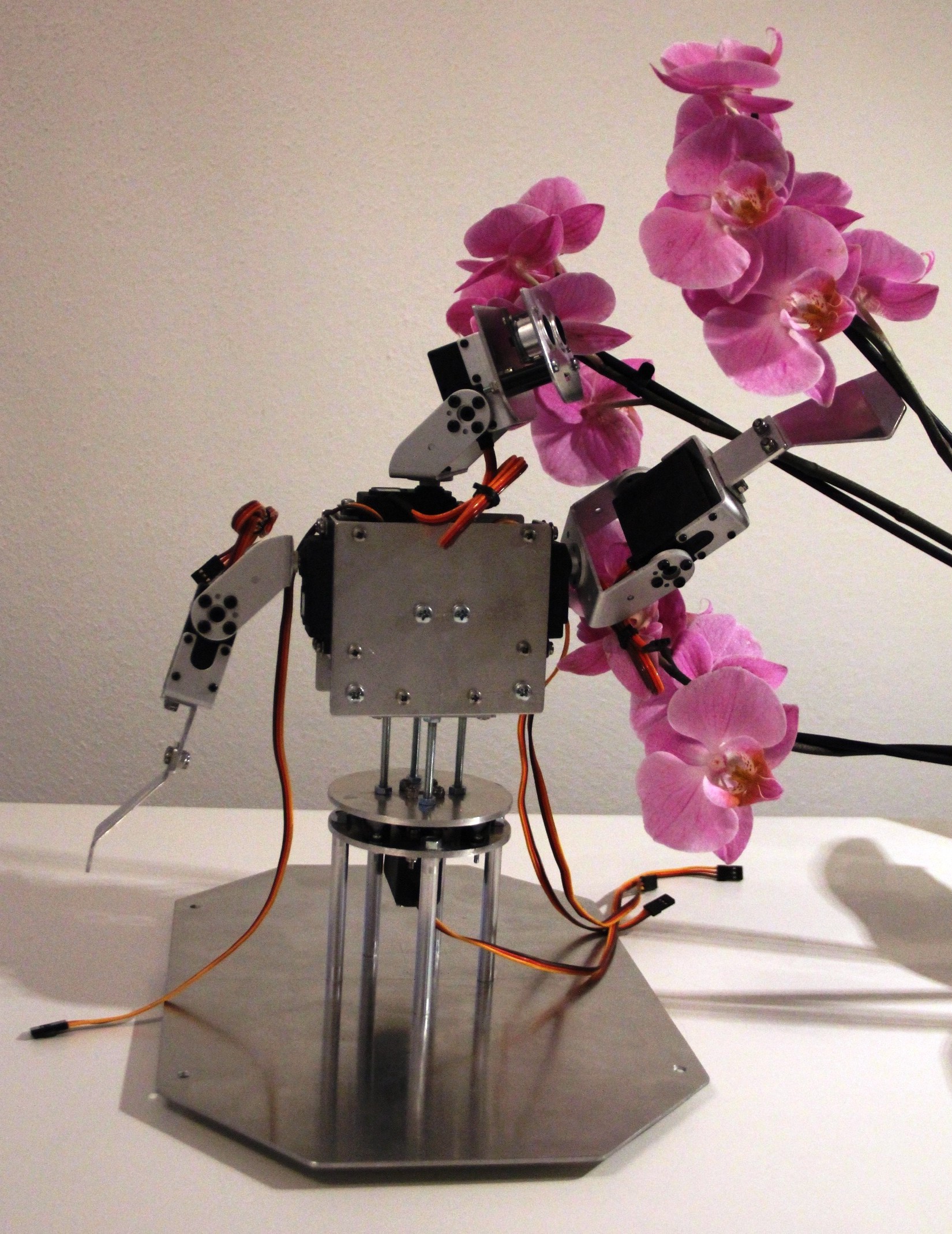 Bottom plate with metal gear-motors 25D x 56L mm, LP 12V, 48 CPR encoder, 80 x 10 mm Pololu wheels and free turning casters finished:
Bottom plate with metal gear-motors 25D x 56L mm, LP 12V, 48 CPR encoder, 80 x 10 mm Pololu wheels and free turning casters finished:
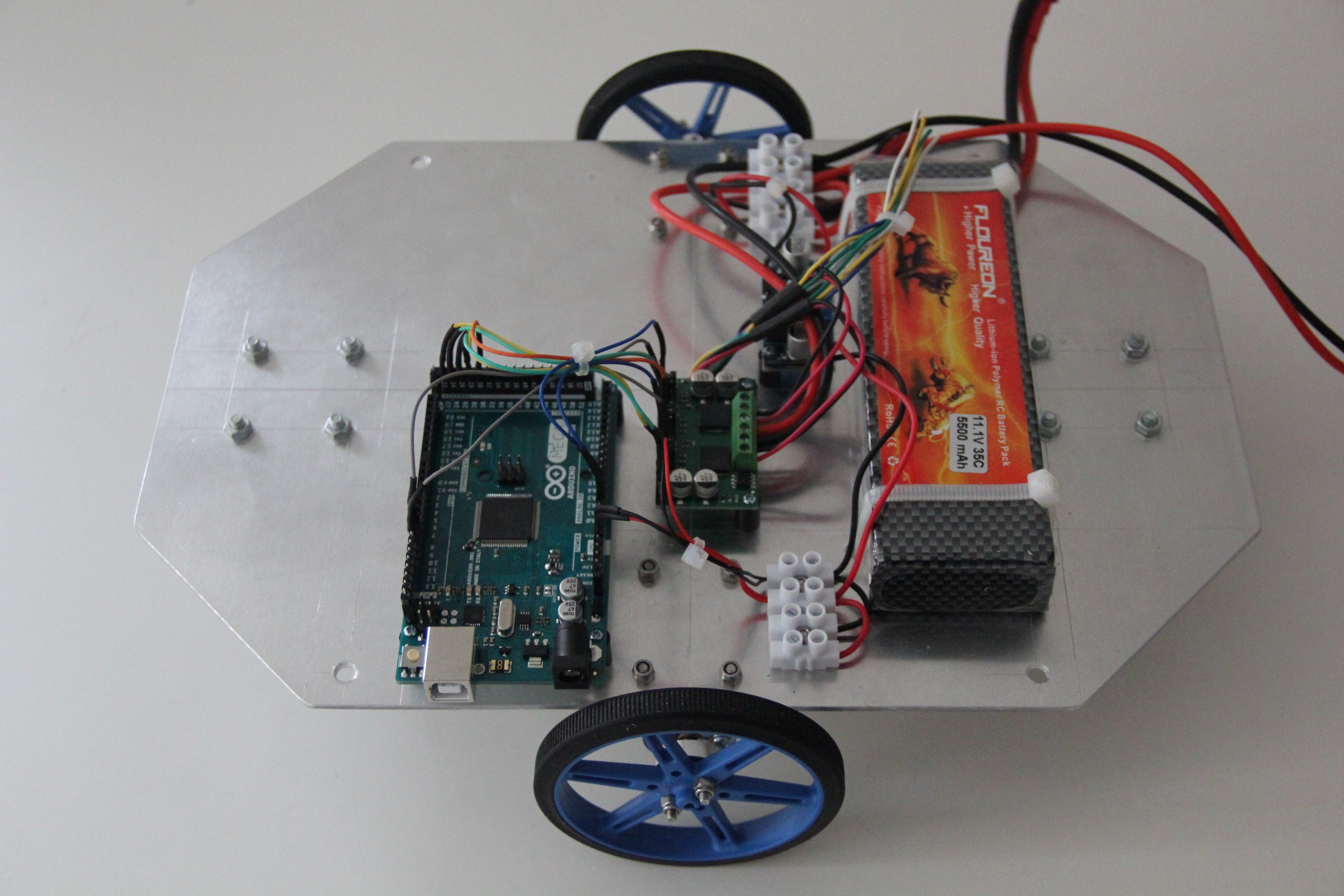
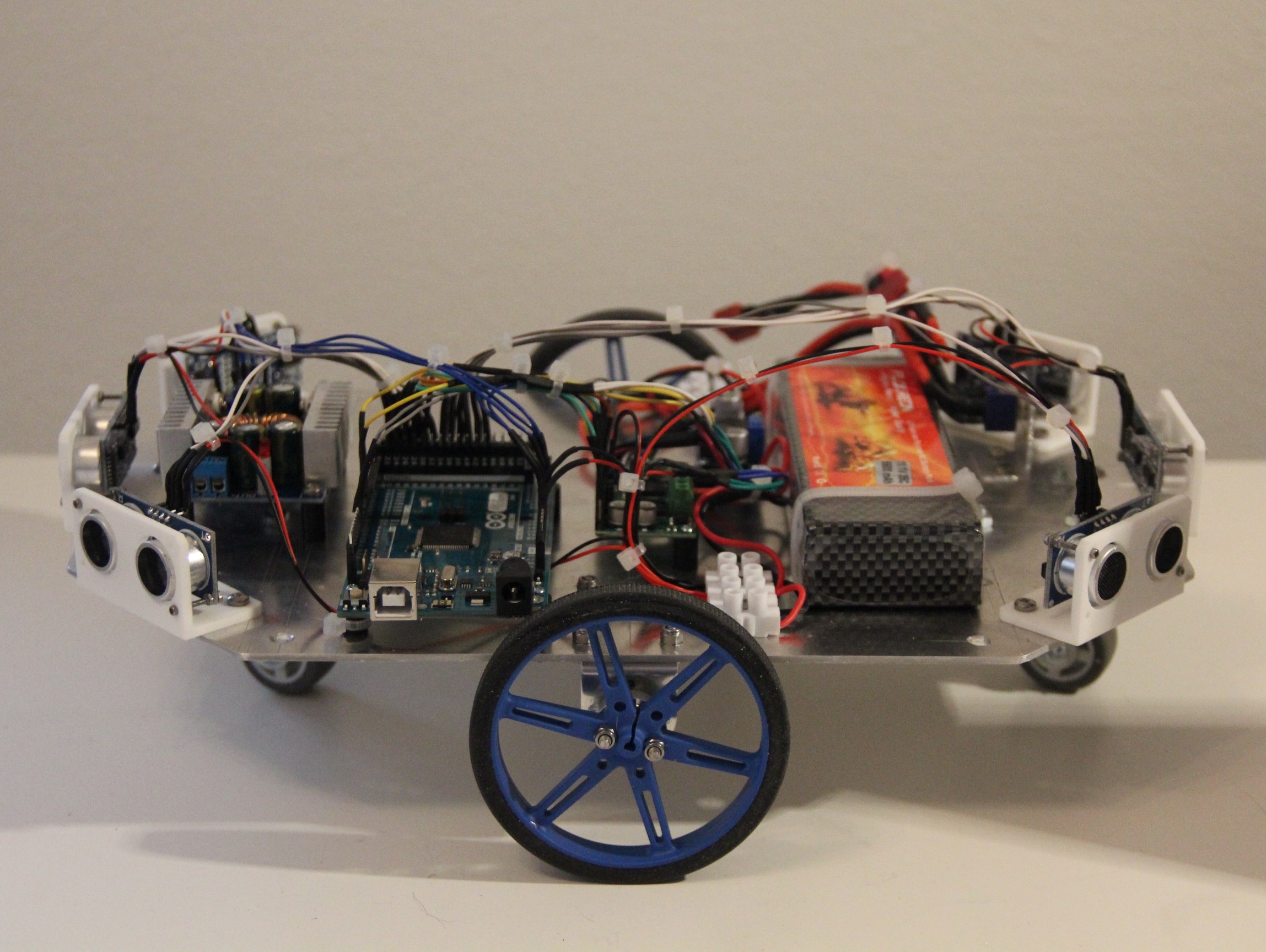
Battery, motor driver, Arduino and 5 V DC-DC-converter attached to perform first drive tests:
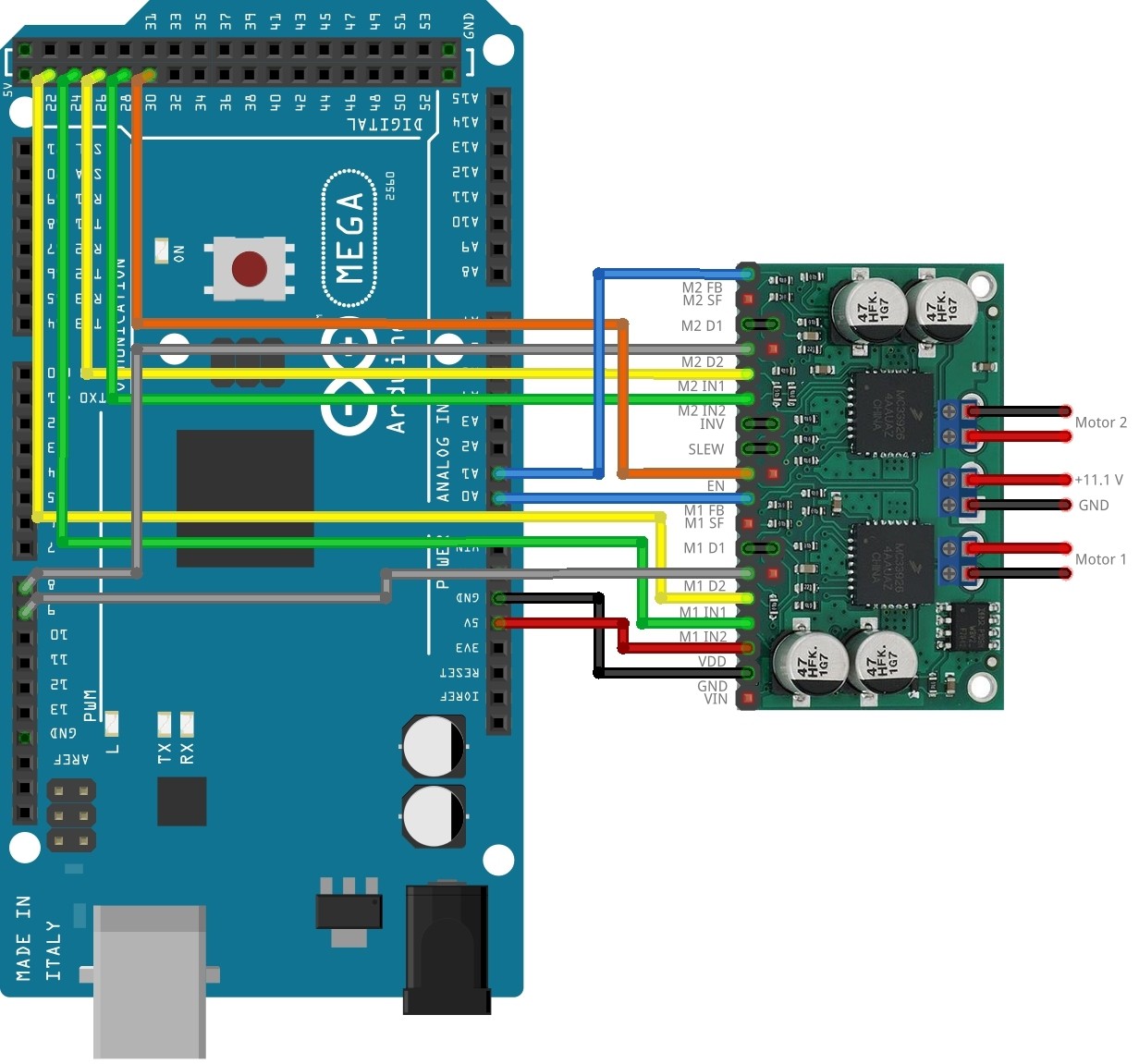
Wiring diagram dual mc33926 motor driver carrier/Arduino Mega:
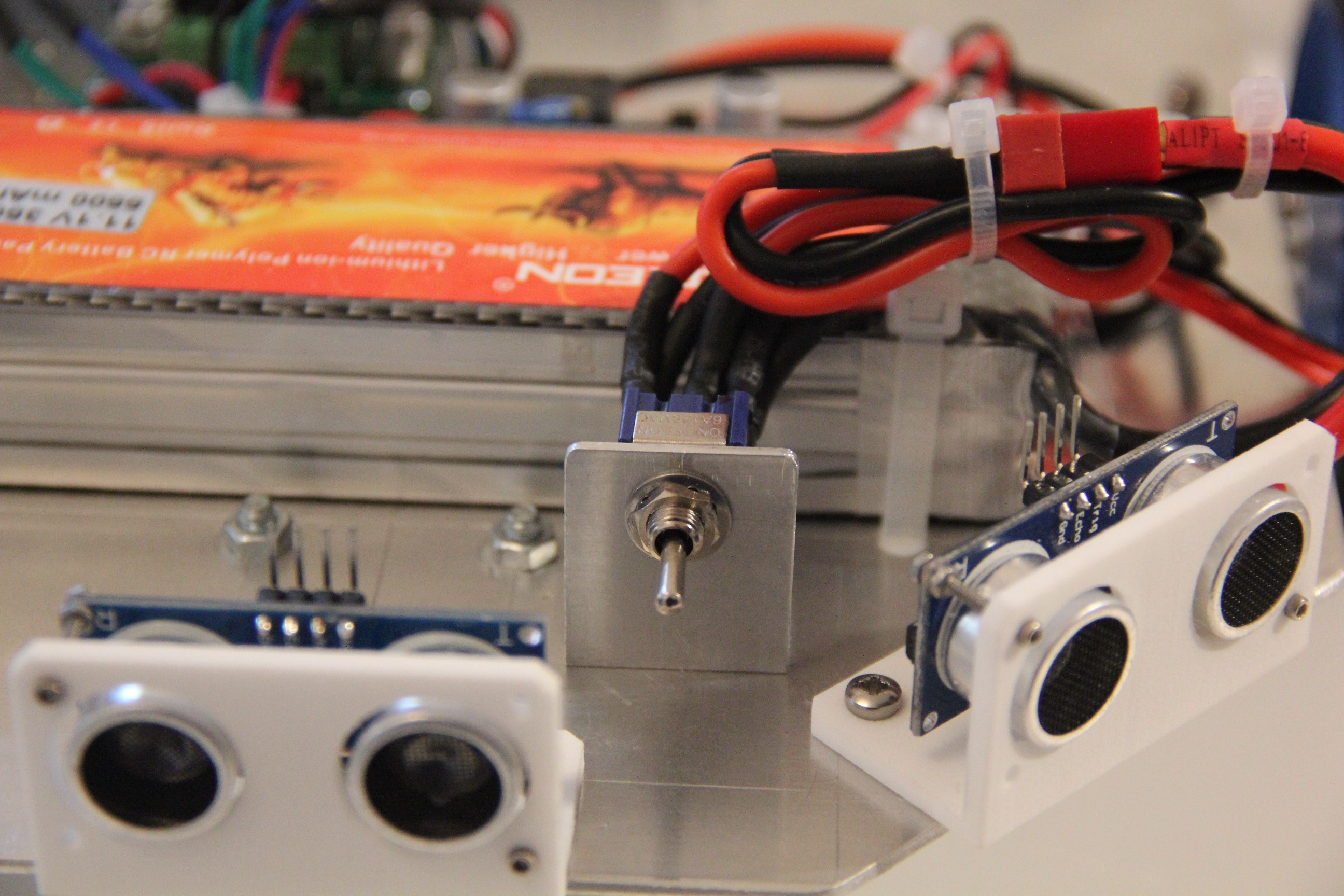
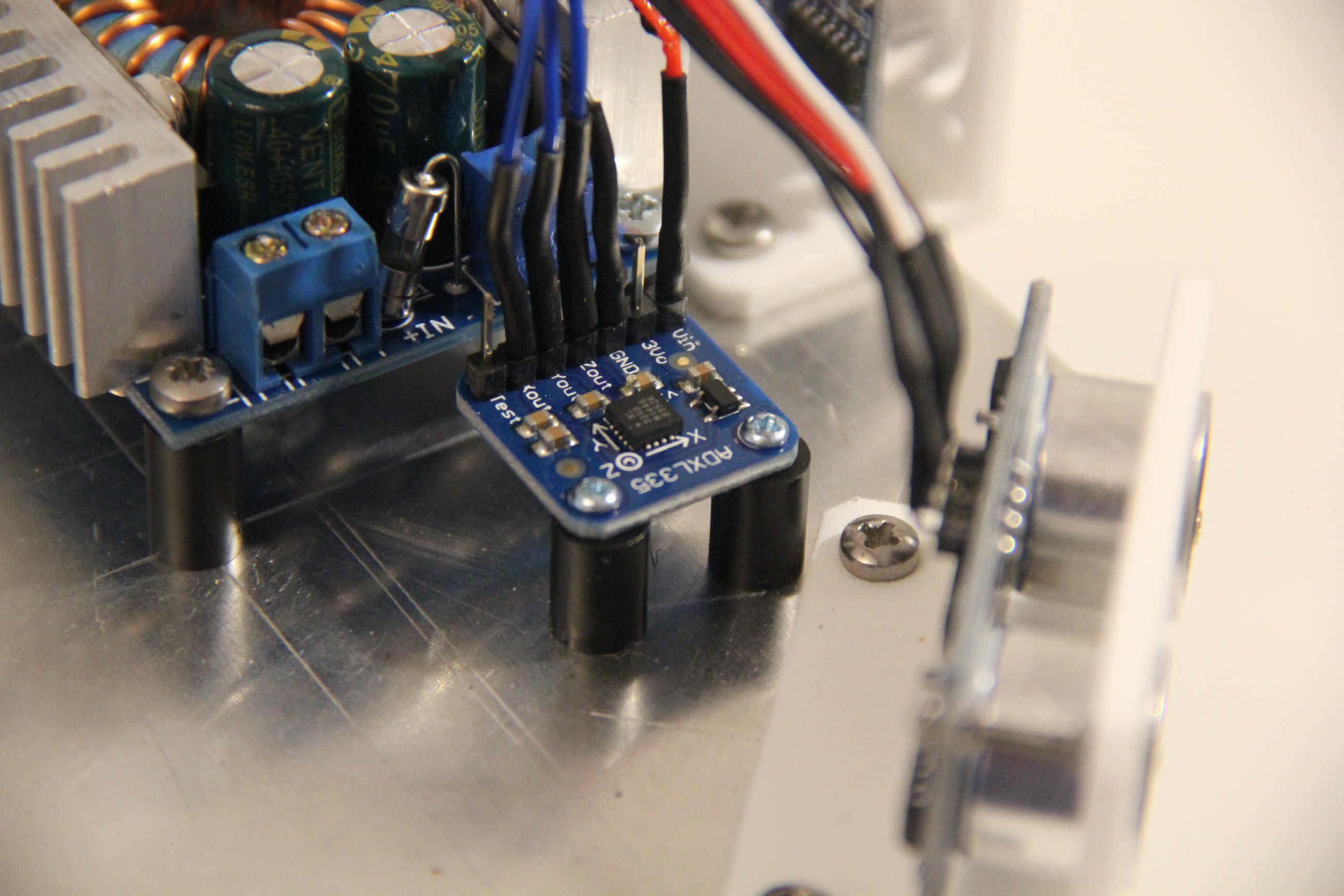
 Ultrasonic sensors, 6 V DC-DC converter, ON/OFF switch and accelerometer added:
Ultrasonic sensors, 6 V DC-DC converter, ON/OFF switch and accelerometer added:
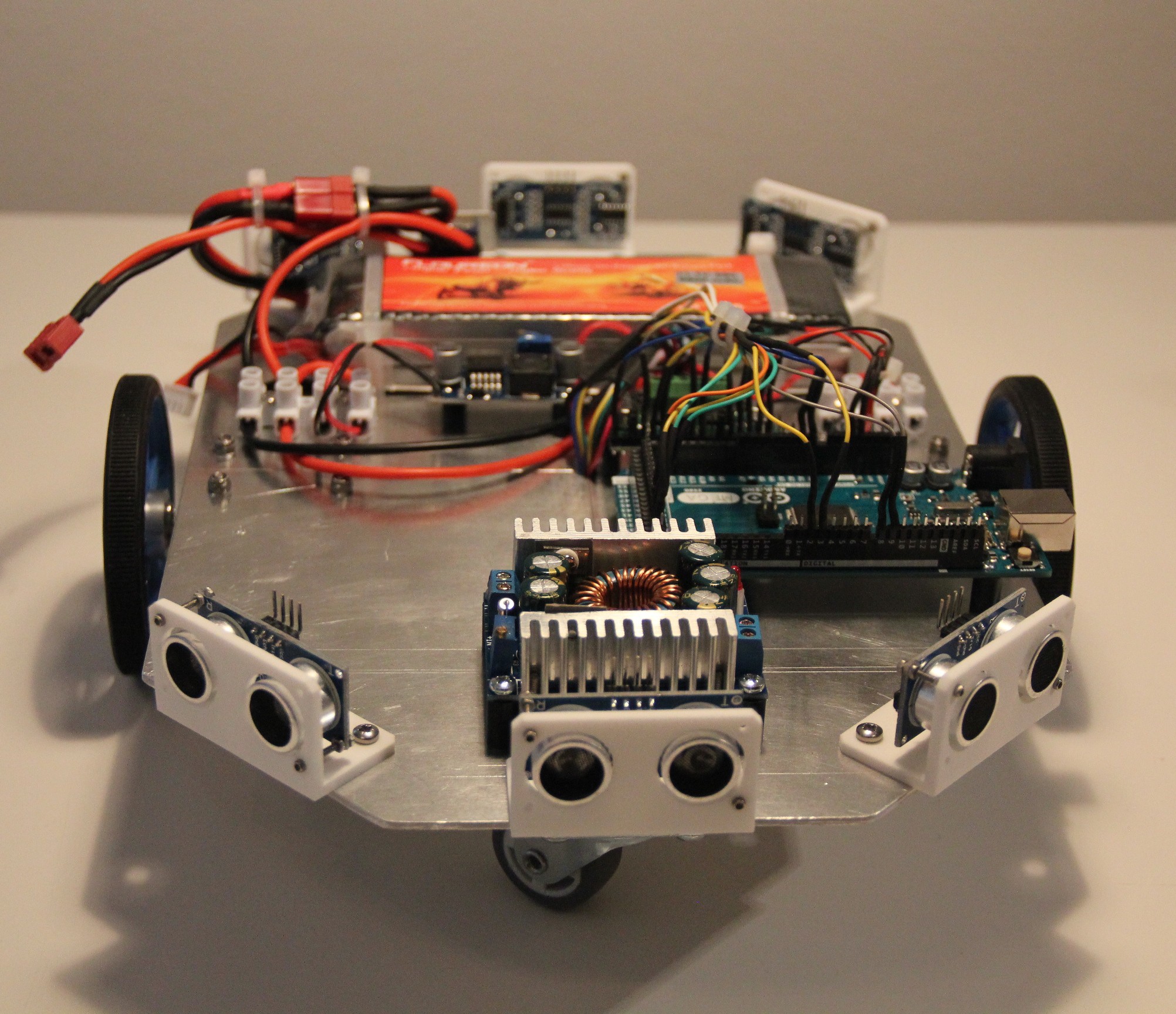
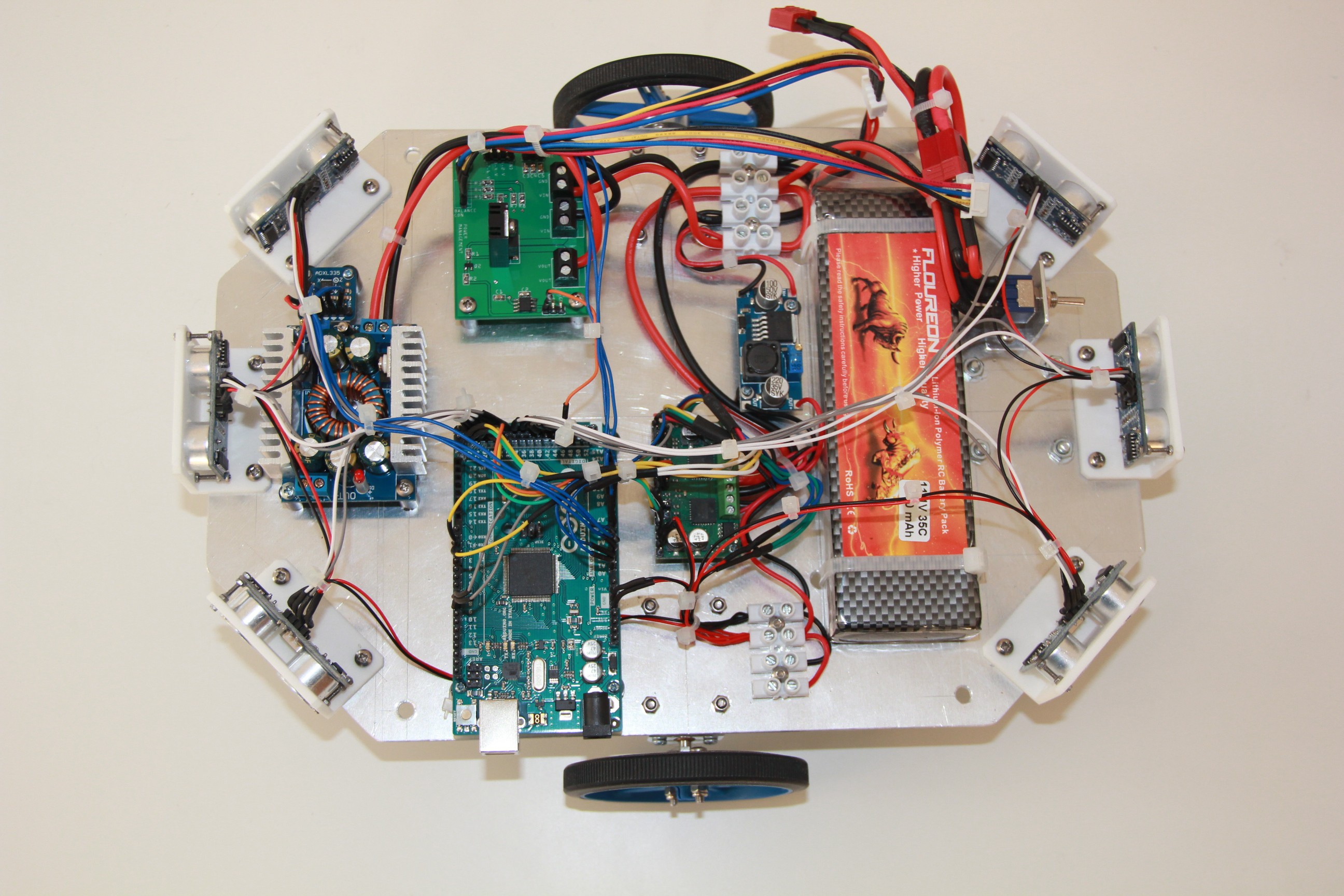
Wiring of the ultrasonic sensors completed:
Nearly finished robot base:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Well, I guess you do not have children yet ;)
Thanks a lot for your interests and the 'like', Radomir.
Are you sure? yes | no
So far I imagined it as a desk-sitting robot, but with a mobile base, I suppose it's going to stand on the floor? I would imagine that makes it a bit awkward to interact with it, as it doesn't even reach the table level?
I love this project, by the way, looking forward to see what you come up with!
Are you sure? yes | no