 Larry W.
Larry W.The redesign of the femur to accommodate a foot switch is in a working state:
https://tinkercad.com/things/lKMM8y2zH88
The idea behind this, is to allow terrain adaptation as well as automatically calibrating the legs on startup.
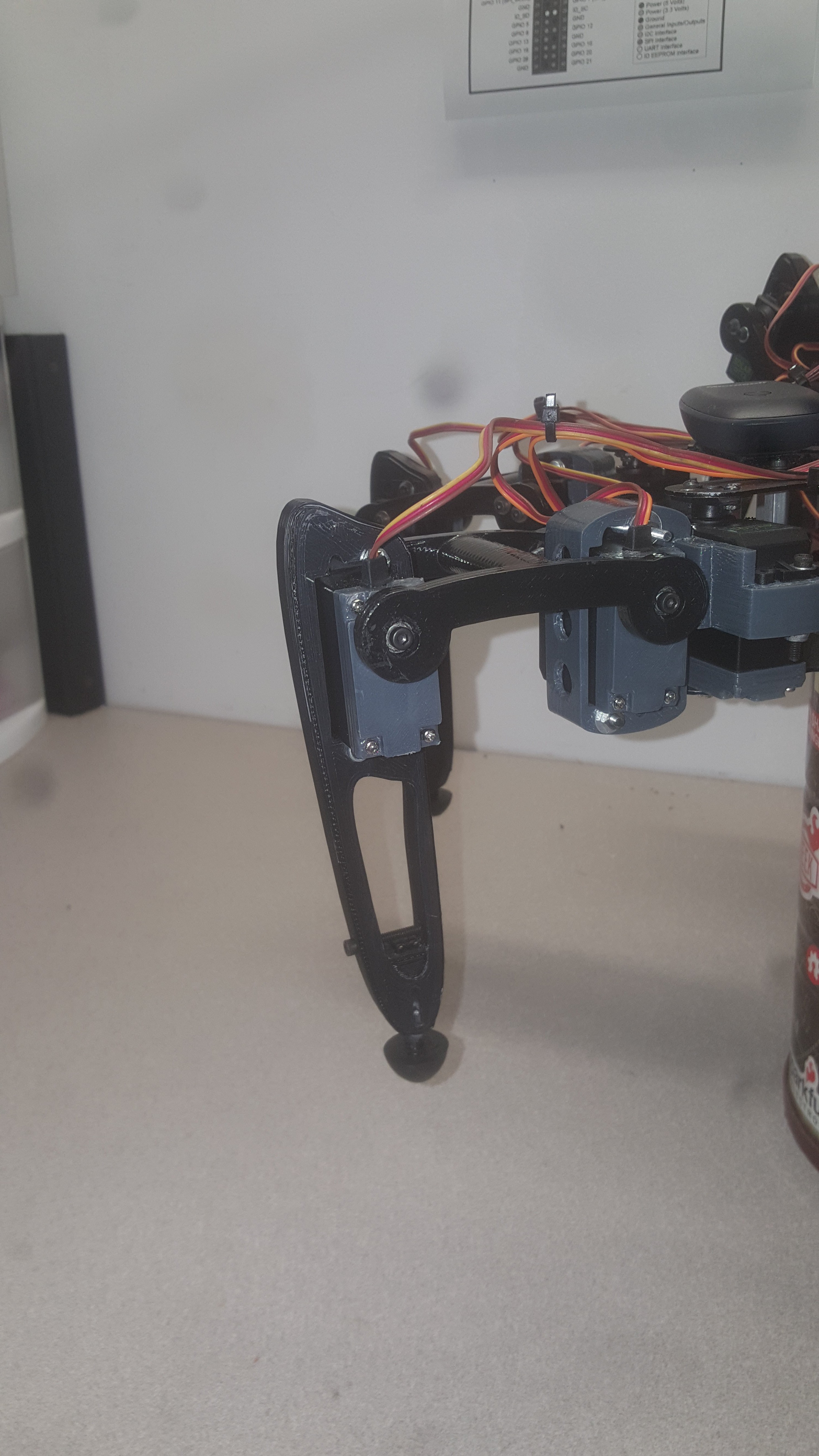
The switch is not yet wired up, not really visible, but it is just under the cap head screw near the foot.
The redesign also allows using a threaded rubber foot typically used on furniture or a small appliance.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.