 EK
EKFor citizen science, we are designing the robot platform as a tool for exploration. A way to run any sort of mobile experiment. This will require the robot to operate in various terrains. We improved the robot, and decided to observe its performance on a Baseline Test on June 17th. Here's what we learned
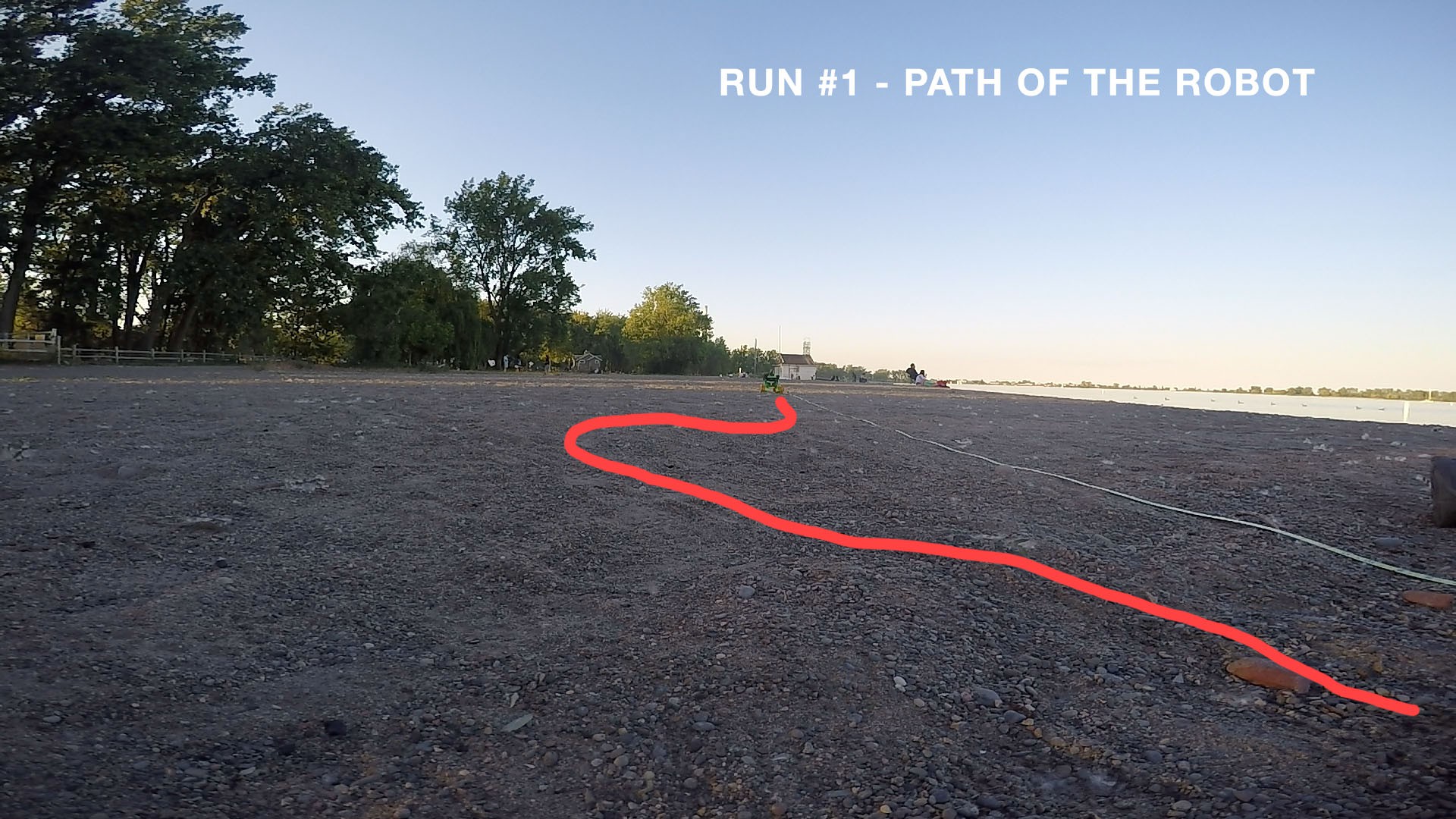
Robot Path
We set the robot out on a 15 meter tape measure distance

We noticed that we dynamically have to make minor turns to drive the robot "straight". This is what happens when we just press forward:
Here is what the bot looks like roving (sorry, very tiny). You can see dandelion fluffs blowing - working in the real world environment has its surprises!

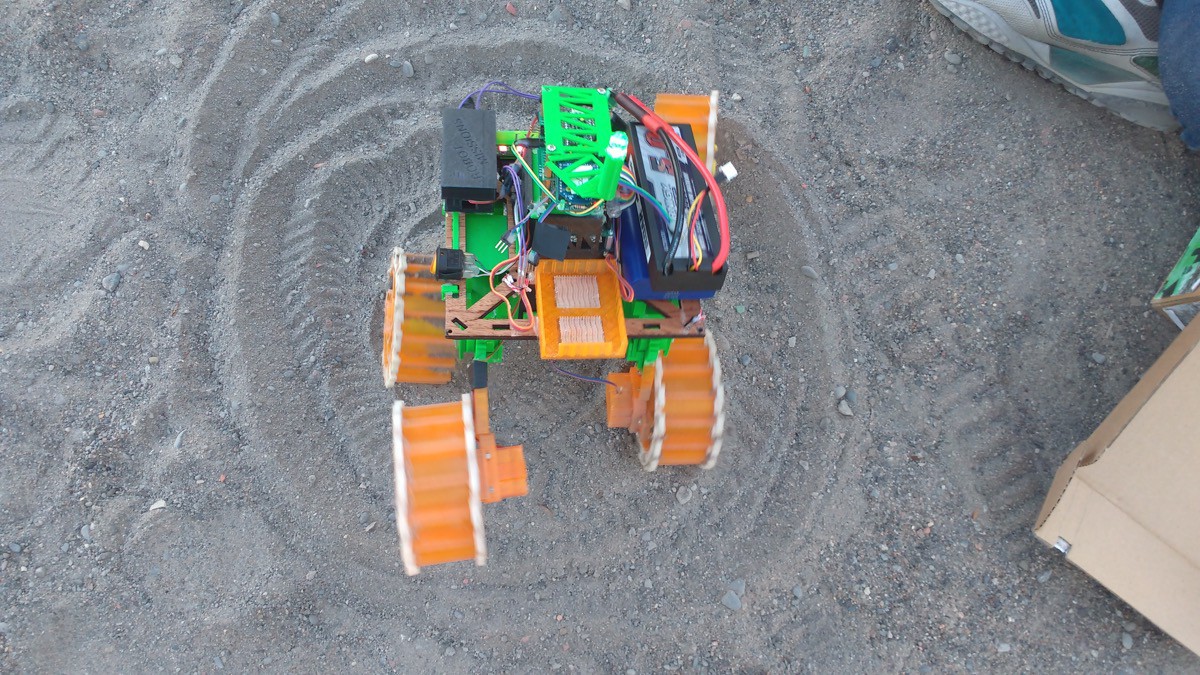
Robot Turning
While doing the previous test we noticed something interesting happening when the bot turns

The tilt drive system lifts up one of the wheels when it is turning in dry sand
We then decided to try wet sand to see how it will differ

Robot in Wet Sand
Wet sand is very different than the dry sand

The wheels on the robot become compacted with sand

This prevents the robot from being able to move

We carefully observed this and tried different ways of driving to see if it can be overcome

Using the water nearby is a good way to wash the sand off the wheels

Now we can drive!

Other
We also tested the environmental sensors - as you can see, it was dark out, getting pretty late!
We enjoyed testing the robot!

Time to make improvements and be ready for the next Field Test!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.