 EK
EK
At the SUPER Field Test, one of the experimental tasks was to test out the autonomous navigation code for the robot to go in a straight line. It uses the magnetometer to get a heading, and follow this within +- 15 degrees.

We set the robot to follow a heading to go towards the flag pole (the Blue Flag beach flag!). The robot worked through the sand to go to it! You can see the point where it hits the 15 degree threshold, then adjusts accordingly.
Here is the entire view of the track:

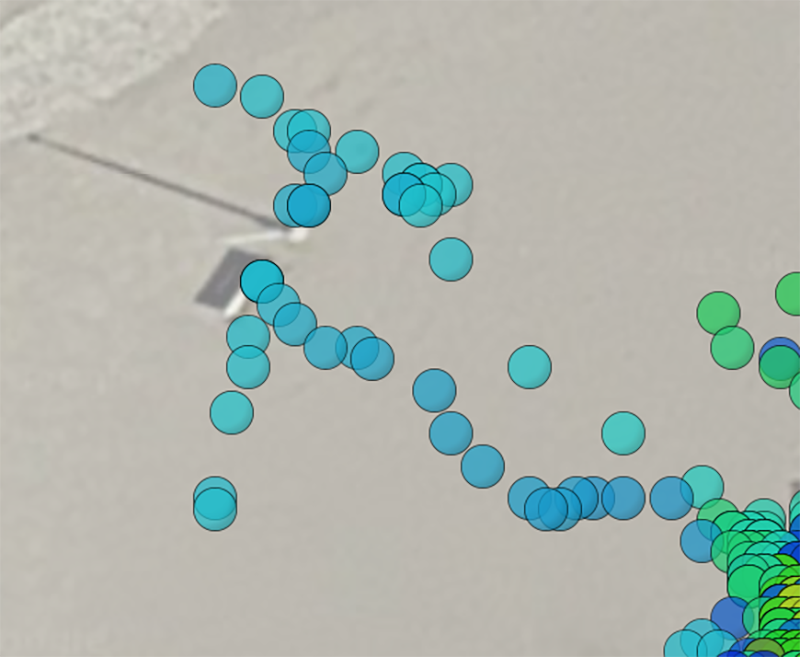
Here is the point where the adjustment was made:

We were excited to see if the GPS onboard the robot would have mapped this, and it did! You can see the point where it made the adjustment!
Special thanks to Sam, Randy, Elaine, Derek, Agnieszka, and Sen for helping with the Field Test!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.