 EK
EKIn order for the robot to follow along a straight compass heading, we use AHRS with the 10 DOF IMU onboard the robot. This means the magnetometer is tilt compensated, and that the gyro sensor is fused with the magnetometer.
We were using the Madgwick AHRS algorithm. The code for the robot is here
Here you can see the tests in action:
Results
Over the length of approximately 12m, here is what our results were:
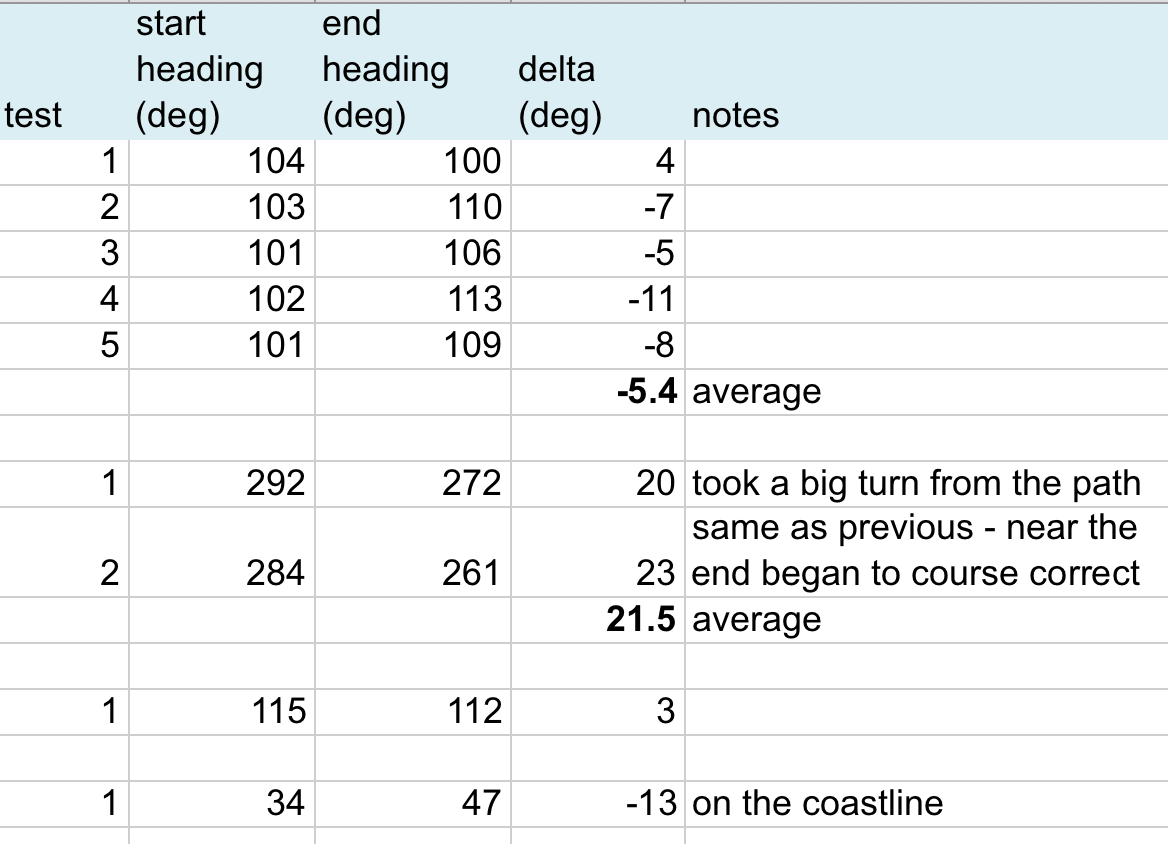
The robot performed better going east than it did south. This might be due to improper hard-iron and soft-iron calibration of the sensor.
Observations

Given how cold it was, the robot had good traction in the snow. After going forward for some time, snow would build up on the outside of the wheels.

It's cold near the water in the winter, but all of this for collecting new information on the robot to improve it

Outcomes
Next time we improve the robot, we will be using a Kalman Filter instead. This will allow us more control over what sensor is listened to, and how it is corrected, to get the compass heading.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.