 deʃhipu
deʃhipuI didn't really put much thought when designing the legs for this, figuring out that I need to play with the physical parts first to get the idea of what I actually want. So I just put holes in the places where the segments join, and that's it. Now I need to somehow attach servos to that. A little bit of dremeling, and I have a much better idea of what I need now:
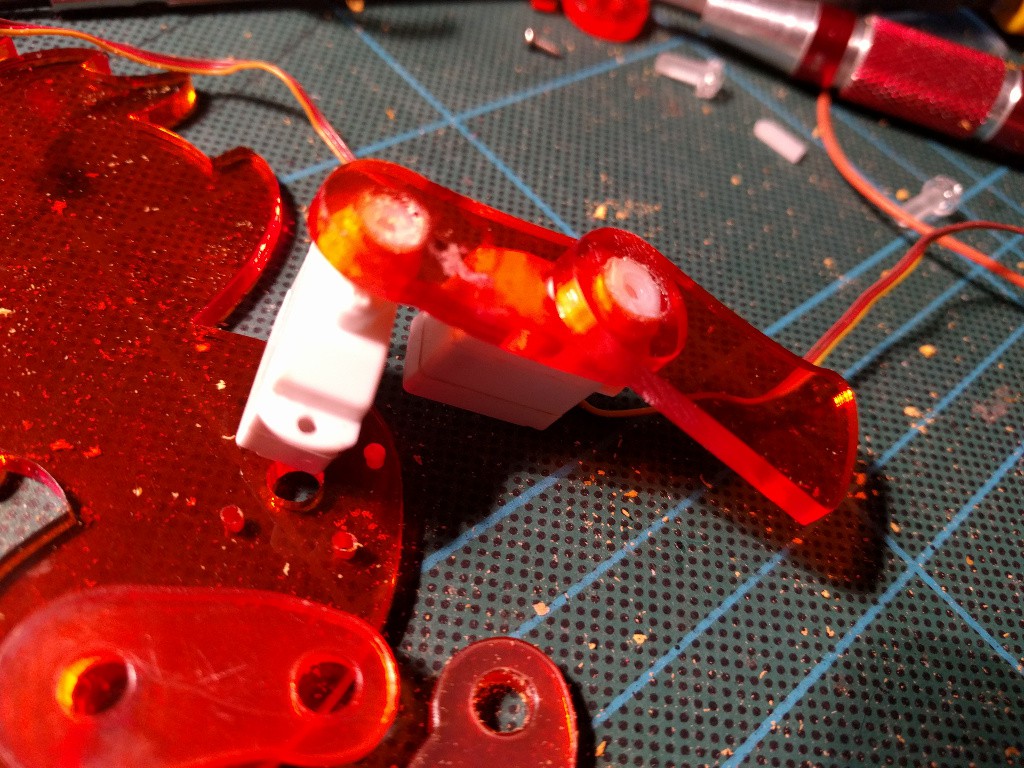
For one, I need thinner acrylic. This is 3mm, because that's what I had on hand. I think 2mm would be perfect here instead. Second, I need actual servo-shaped holes for the servos. That should be easy to fix. FInally, the hind leg's femur is too short to fir a servo there -- I will need to make that longer.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.