 Kenny.Industries
Kenny.IndustriesThis is exactly what Avatify does:
"What we need at most is a person, who forces us to do what we can do" (Ralph Waldo Emerson)
And thus my motto:
There's no style, wasting time.
There's no style, neglecting one's health.
Style is stop wasting with Avatify.
Planning is a complex task, thus often neglected.
It is "complex", because it requires focus, which means it is a task done by the neo-cortex.
The tasks done by neo-cortex is logic but slow and power-consuming.
Furthermore most of the planning process consists of rescheduling periodically repeated tasks.
Therefore I wrote a program that calculates automatically the complex frequencies in which tasks are repeatedly done.
Repetition of Action is called habit. And everyone knows that forming a good habit is very difficult. This is for one, you cannot "track" it, so you have a overview of your actions. Secondly, long-termed actions need to be integrated in daily plans, which the cubic robot „reminds to the opportunity“ to execute your resired habits. According to reinforcement learning, emotional feedback is valued most (social support), therefore the smiling face.
In near future I am planning to create an entire web-app, iOS-app and Wearable.
In the near future, to be more invasive into the daily life, to stick to the plan: It will have a 128x64 OLED display, HM-10 BLE module , heart-beat sensor, MPU6050, and a vibration motor.
First UART-Tests with the BLE-Module was successful, now I am trying to use the AT-Commands to configure it as TYPE3-Connection, which is the "Pairing" mode.
For the enclosure I choosed a TPE Flexible Filarment from SainSmart, tried it out with a cheap 3D Printing pen, but it didn’t go well, so I’ll buy one for myself.
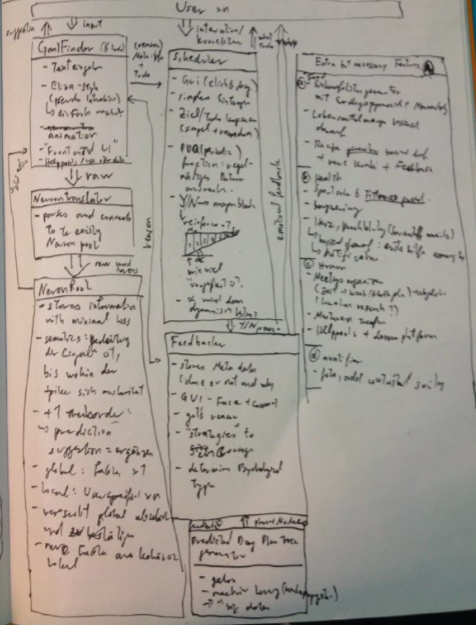
There is also an update regarding the software. Now I have a very clear vision, what this machine should do:
If you consider my project is being called Avatify, consisting of the words „avatar“ and „…fy“, which means to convert sth. to an avatar.
WHAT do we convert to an avatar? Your Goal-Management. You need to break your goal down into smaller pieces.
These „smaller goals“ need to be also broken down, until a list of Todos remains.
This Todo-list will be scheduled into a monthly, weekly, daily plan.
The planning process contains more than the word „breaking down“ to explain.
Firstly the program supports you find your goal by stating it clearly. Then you will be asked to classify a importance to it, which could be machine guided.
Secondly, all the data of the former step from all the users will be used anonymously as a crowd sourcing mechanism, to suggest in which smaller parts your goal could be broken down.
Thirdly, due to the crowd sourced data, which represents „experience“ , the cost for each goal and step can be estimated more precisely.
At last, the system communicates with you to find out how frequent you want to do such a task. This information is passed to a scheduler.
This scheduler works feedback-based, which is the crucial part of Avatify.
Providing a Planning Software is not enough to ensure to accomplish one’s goal, because every plan requires adjustments.
These parts can be done by a computer easily, because it is a „logical“ task. But a real feedback of the plan is not just „done“ or „not done“. A better feedback would be you are happy or not.
Therefore your personal avatar will be happy to see you succeeding. This is the basic principle, and the system will be able to evolve more complex emotions in order to keep your brain and heart connected.
Due to the feedback mechanism, you aren’t just motivated, but your plans are kept realistic.
Open Source Tools I'm using under the following terms.
Arduino
WordNet
Node.js
Swift
NLTK
SCIKIT
PYTHON



 Bruno Laurencich
Bruno Laurencich
 Vojtech Pavlovsky
Vojtech Pavlovsky
 Kaspar Emanuel
Kaspar Emanuel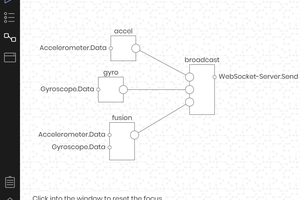
 hrkltz
hrkltz
How you made the wire project? Can you please share the documents list of your project? I want to test it for my coaching site, you can see here https://dennisberry.com/