 TK
TK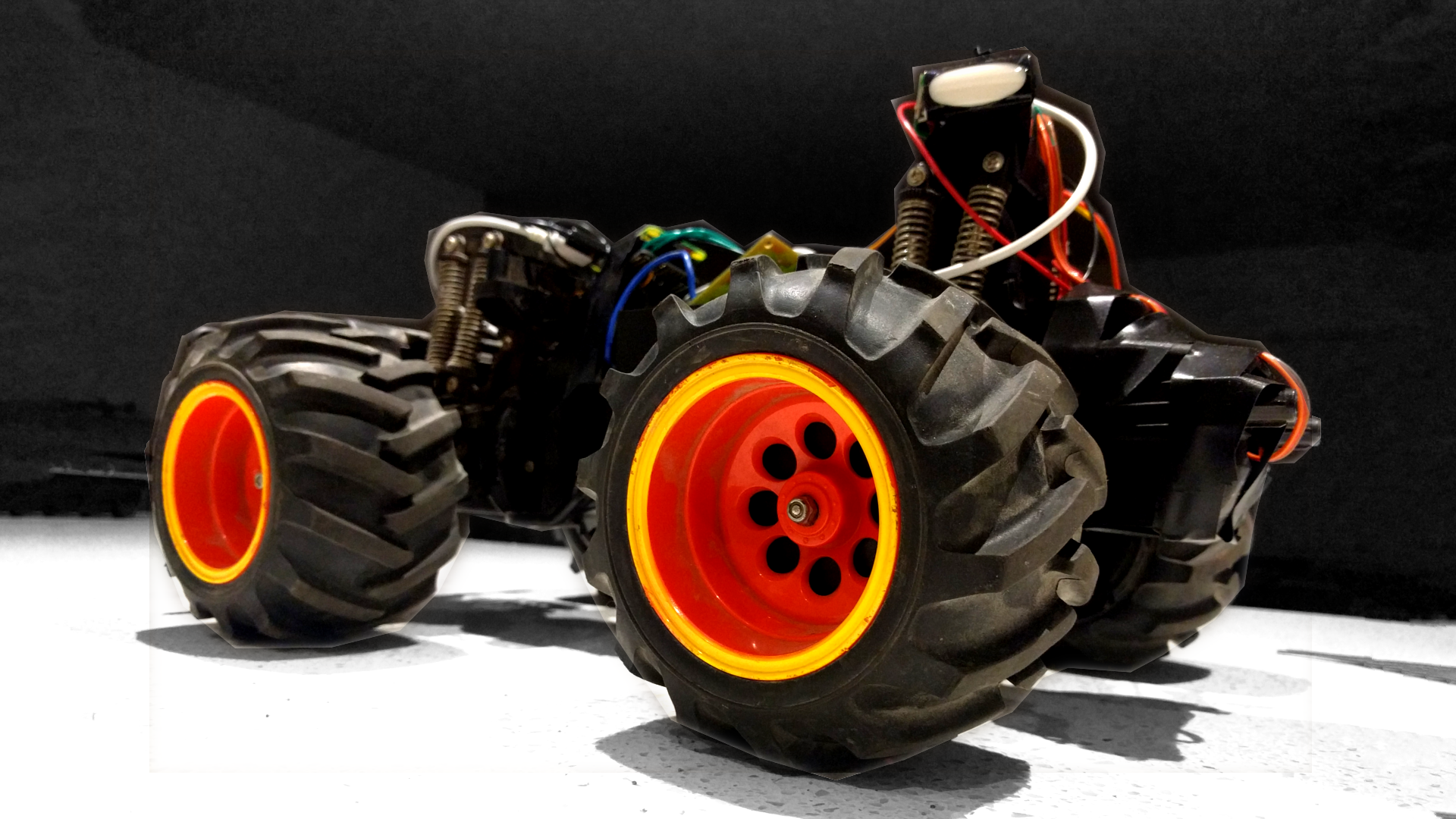
At the end of our last episode, we had steering and drive control through the Raspberry Pi... just. But we'd gained it at the expense of some poor blown transistors and things weren't really going too well.
It was time for upgrades. In this episode, we replace the original steering box with a servo and reassemble the whole car. Then it's time to try out remote control with our Python code over WiFi... and it works! It's a truly elating feeling getting the thing screaming around the kitchen and bathroom all done wirelessly over the network.
So what's next for TKIRV? A webcam and cellular internet, of course. Get thirsty. But for now, feel free to read the log.

First things first, we switched from a Raspberry Pi (original flavour) to a Pi Zero. Why? Well, the long term goals of the project involve solar power and the Pi Zero draws less current than the other models of Raspberry Pi. That, and Alex wanted his Pi back so he could play emulators again. Damn.
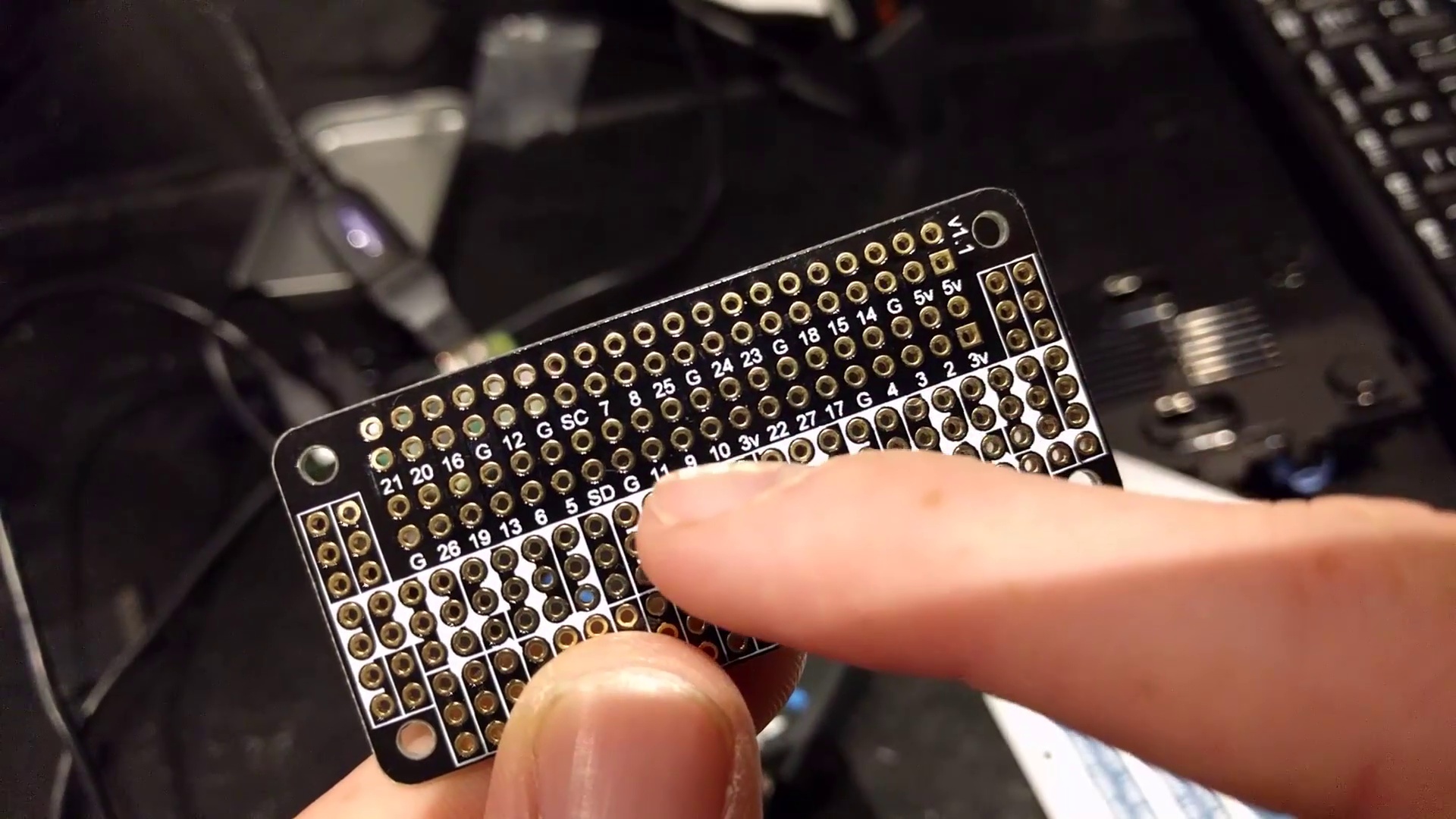
It really was painless going from the original RPi to the Pi Zero - we literally just swapped over the SD card and things booted straight up! I thought that was really impressive. We then got this cute little Protozero "hat" for the Pi Zero. It's basically a protoboard that neatly fits the form factor and allowed us to really tidy up our wiring.
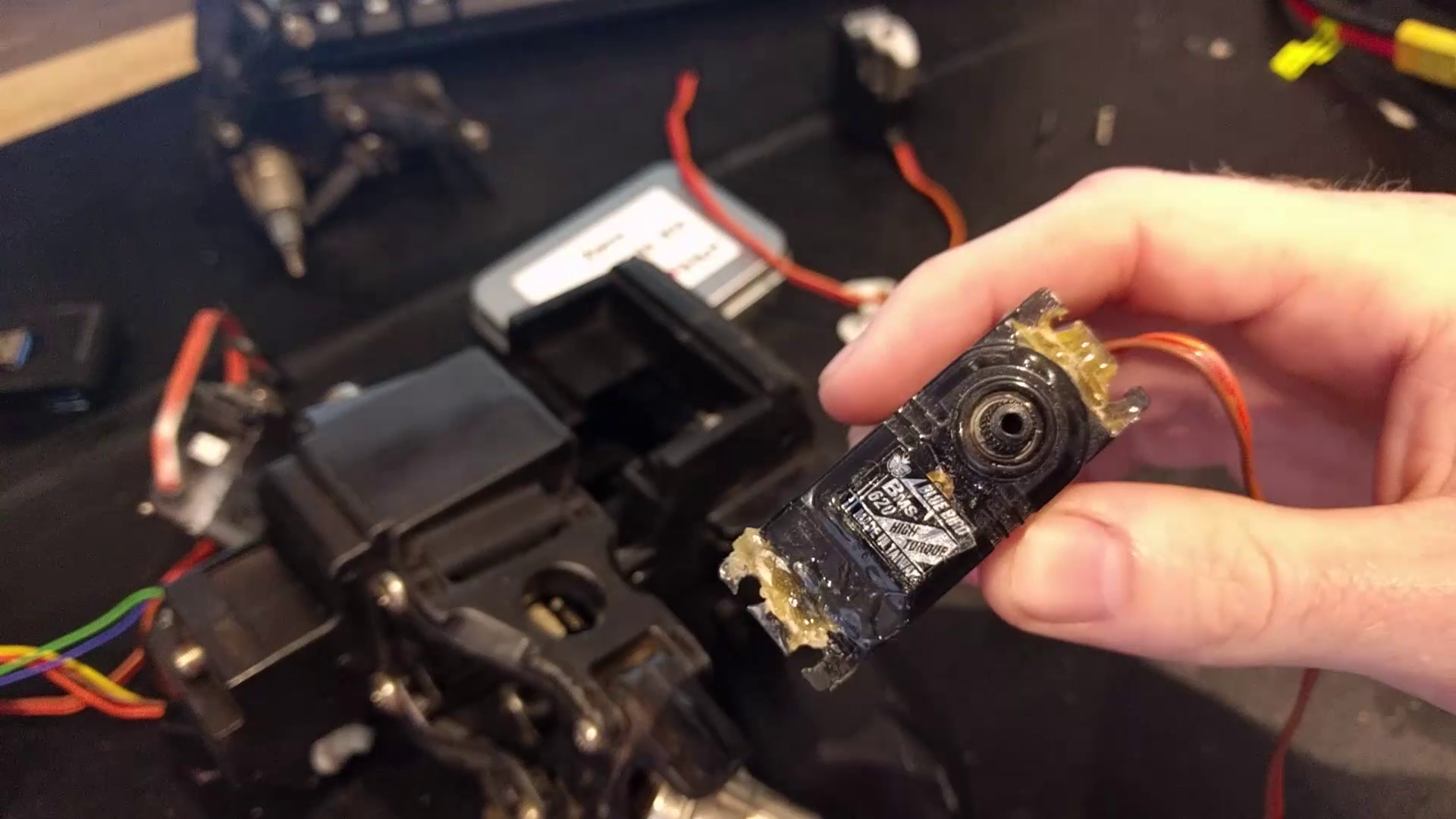
In Part 2, we'd done a lot of damage to the original car's steering electronics and an absolute hatchet job of fixing them up. I reasoned that maybe it was time to just sub in a big fat servo from Hobbyking. This was great... except I blew up our Pi Zero in the process. Cue a 3 week wait for a replacement to ship. They're not easy to get a hold of.
The job involved a whole lot of epoxy and special plastic glues to adapt the original steering box's servo saver to fit the new servo, and a bit of hacking away to get everything to fit nicely. But once it was done it was sturdy and neat.
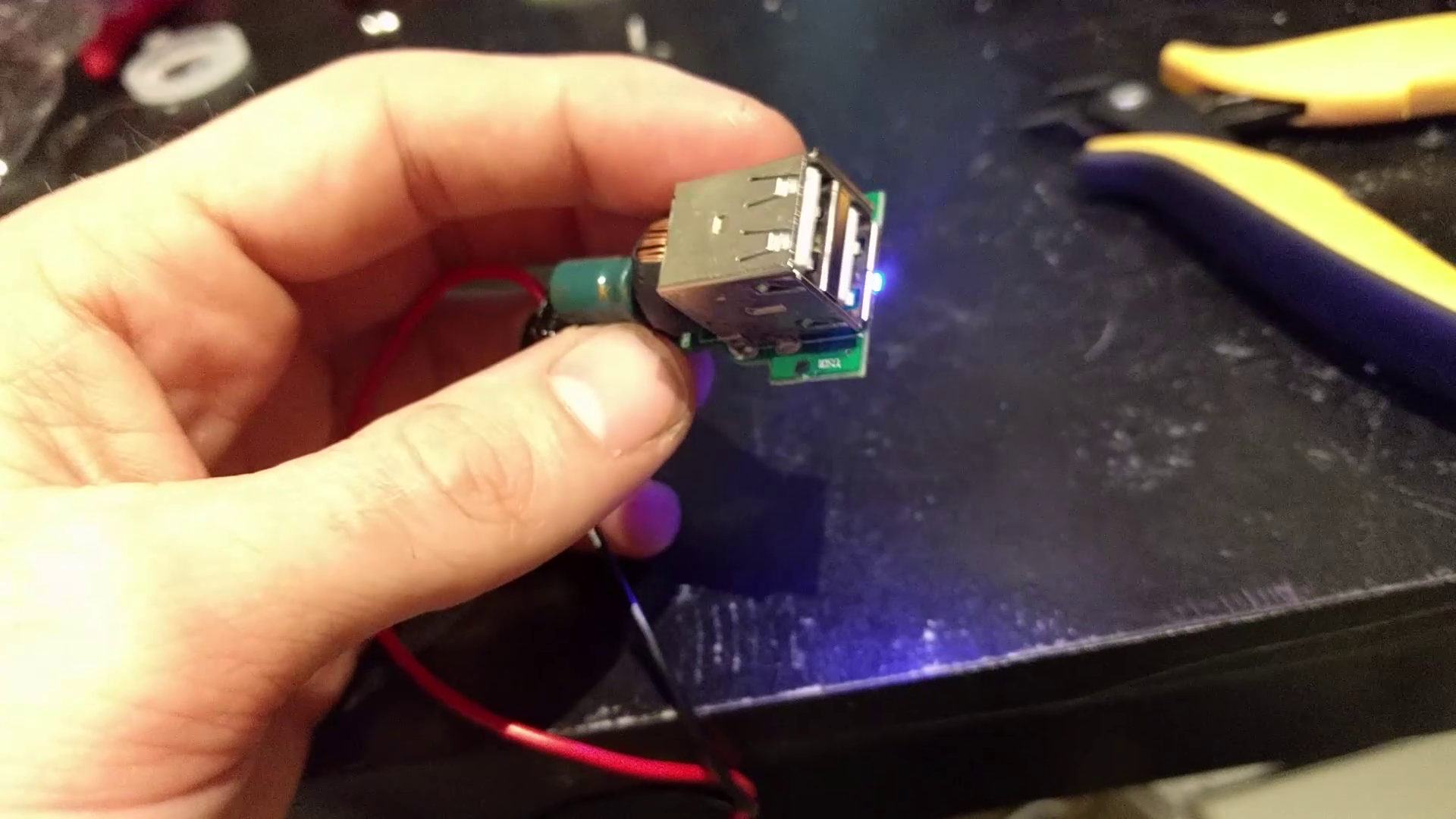
Now all of a sudden we found ourselves at the point where we had steering, drive... we just needed power and hell, we could drive this thing! I had a hunch a typical 12V 2A USB car charger would operate just fine off the 8 or so volts in our 2 cell lithium battery. I think I was right; initial testing showed it putting out a solid 5.1V under load to run the Pi Zero brains of the operation.
Then it was time to wrap everything in electrical tape and try it out. Finally.

My hand hovered above the cursor keys. I drew my breath in anticipation.

IT WORKED.
The thing was immediately fantastic. After crashing it into the hallway walls about sixteen times we took the thing for a spin around the kitchen and damn, TKIRV handles, bro. Things might be different when it gets out in the real world with 200ms+ lag on a 3G connection but over WiFi this thing was a dream. Then it was time for some carnage.

Poor guy never saw it coming.
It was so great to finally get this thing rolling again after having so many headaches and delays waiting for parts. We've now got a rolling platform we can drive over WiFi; all we need now is to sub in a few more parts and we'll be truly mobile. Till then, enjoy the log and the video... big things are yet to come.
TK out. ;D
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.