 Nelson Phillips
Nelson PhillipsHaving prototyped with soft robotics a bit there was clearly a need to simplify the process. The available technology that is applicable to use was incomplete and/or expensive. This project page details the technologies I have developed to drive solenoids, measure the air pressure of the actuation and whatever else that will come up.
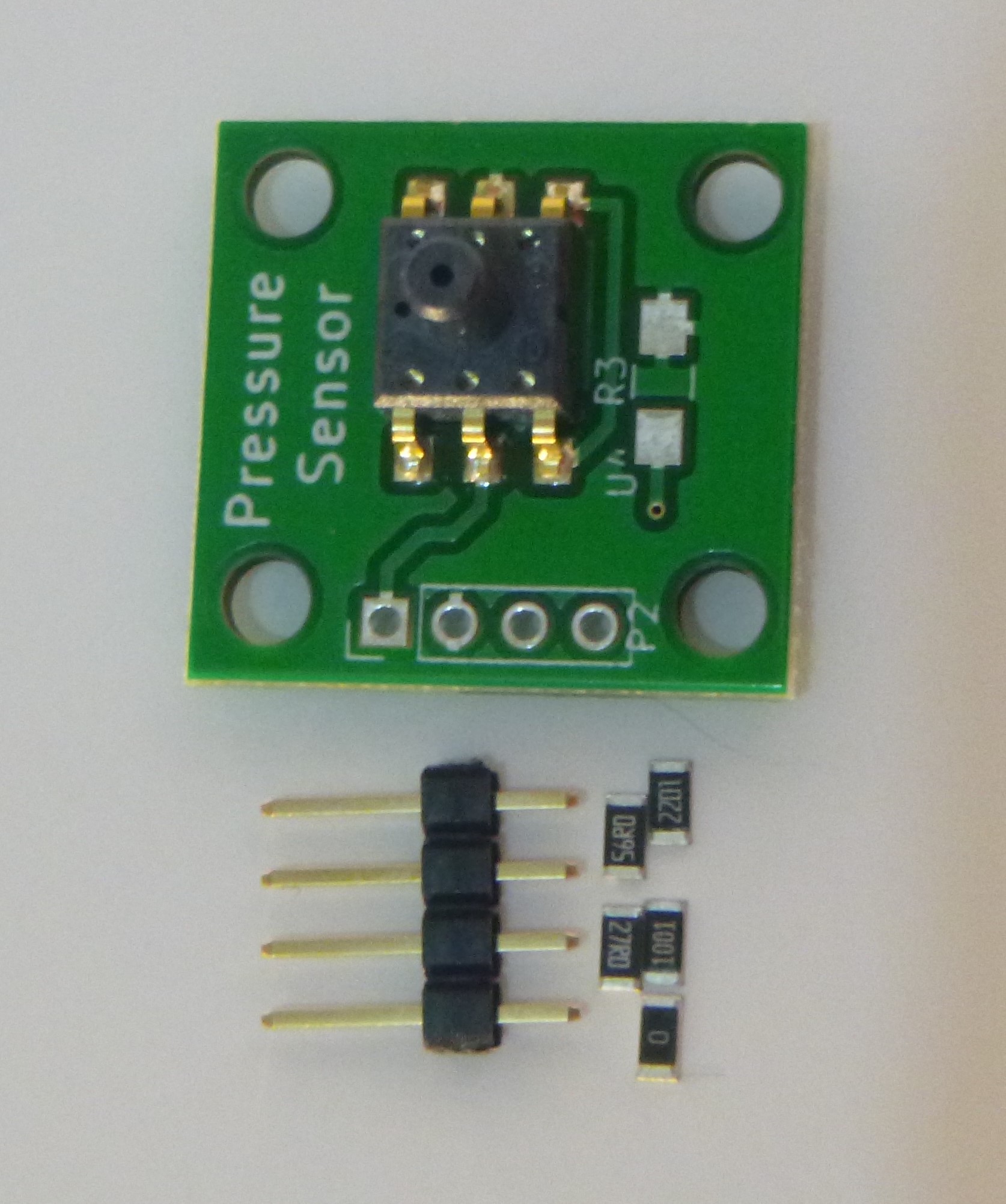
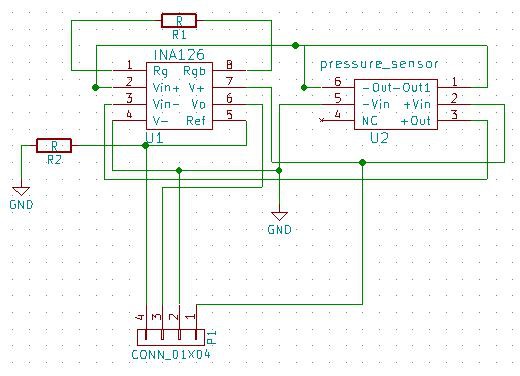
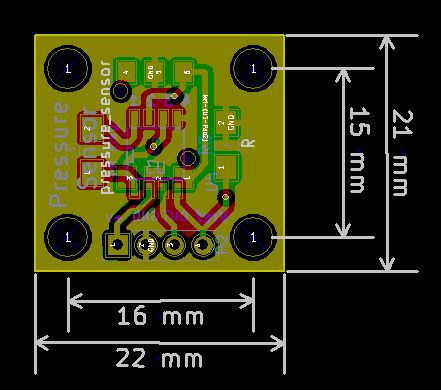
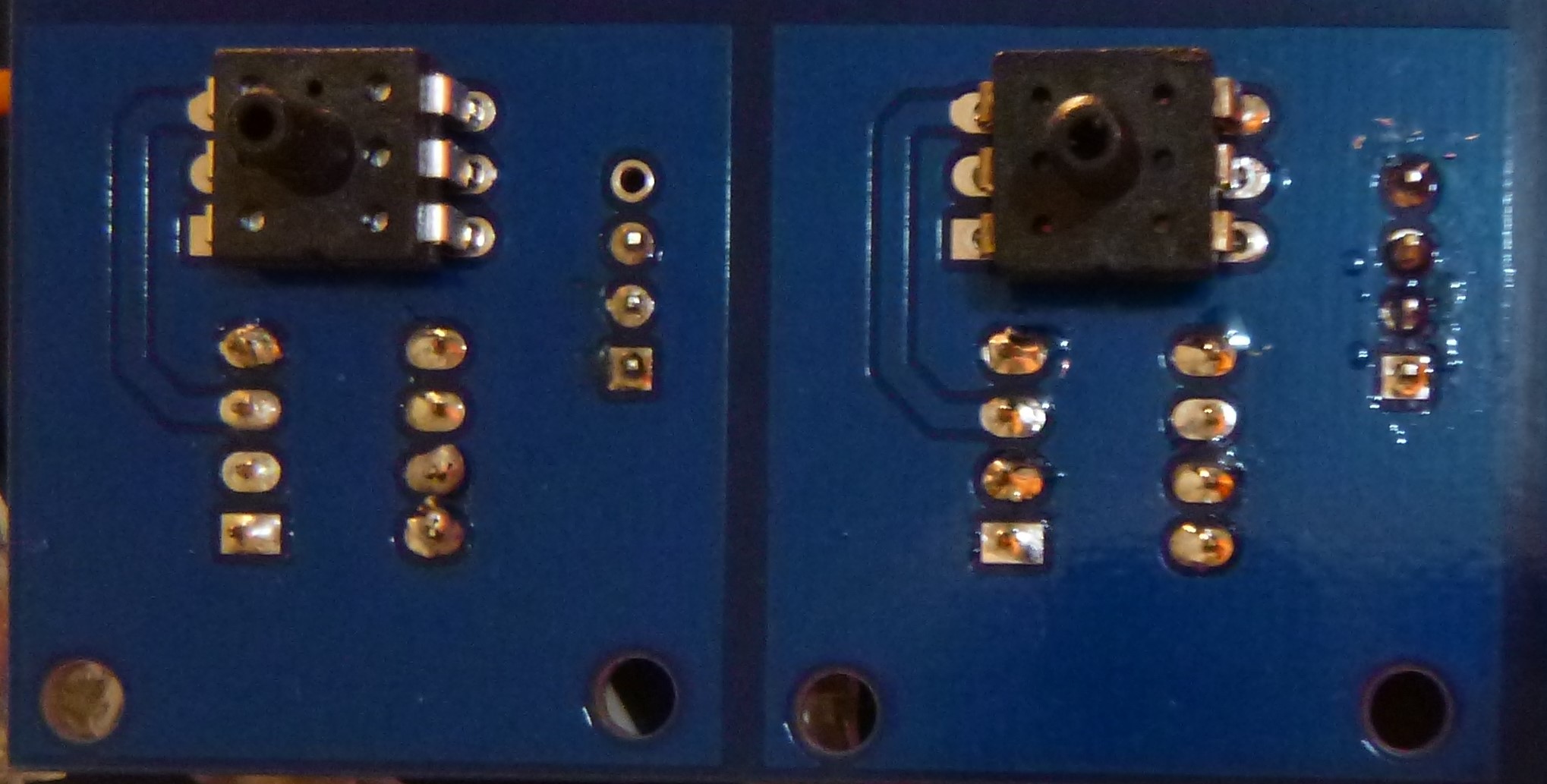
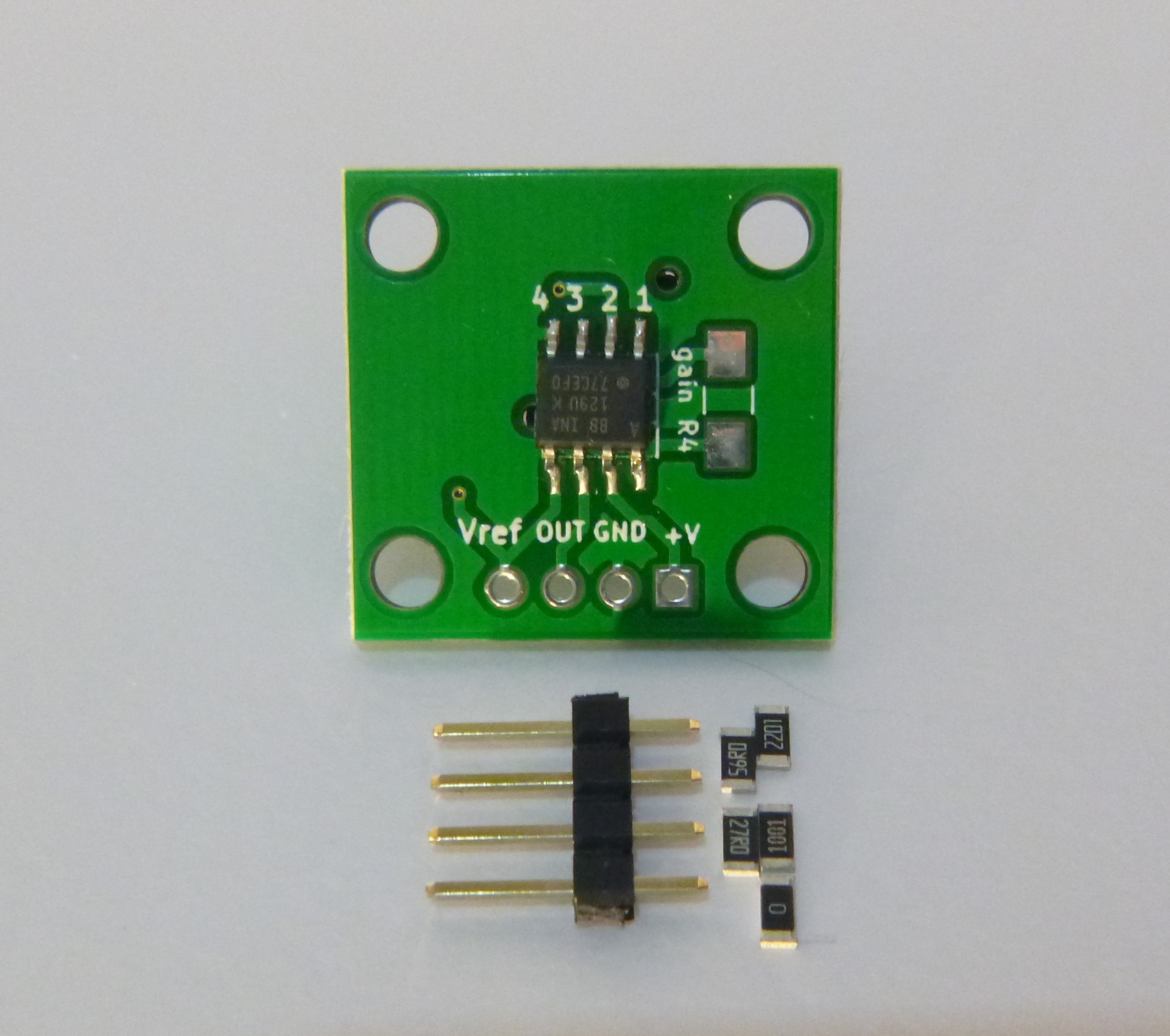
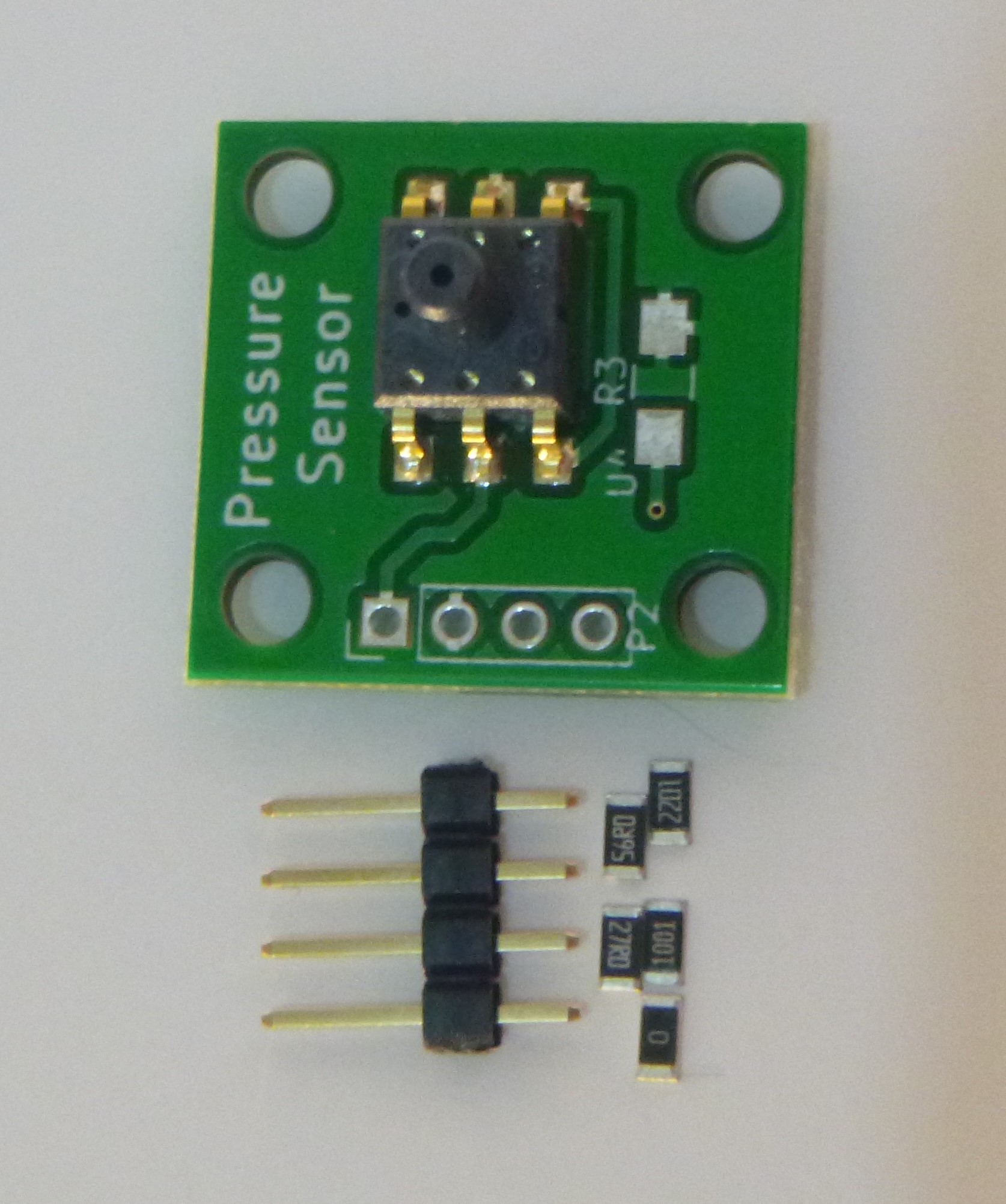
Air Pressure Sensor
The pressure sensor board was the most desirable board for prototyping soft robotics and with playing around this inflow pressure sensors for someone working on a solar cars aero this board got developed. Using the generally available through hole air sensor that was used for monitoring the pressures in the pneumatic actuation of soft robots it was found that they could be made sensitive enough for in flow pressure measurements. So coupling this wheatstone bridge sensor with a instrumentation amplifier a board with some flexibility was produced for both purposes. This board is available on the Tindie store. https://www.tindie.com/products/aNelson/pneumatic-sensor/
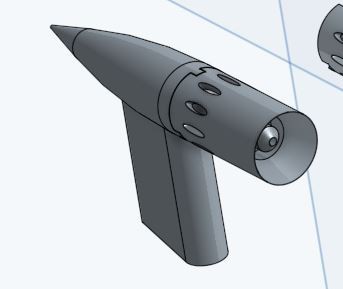
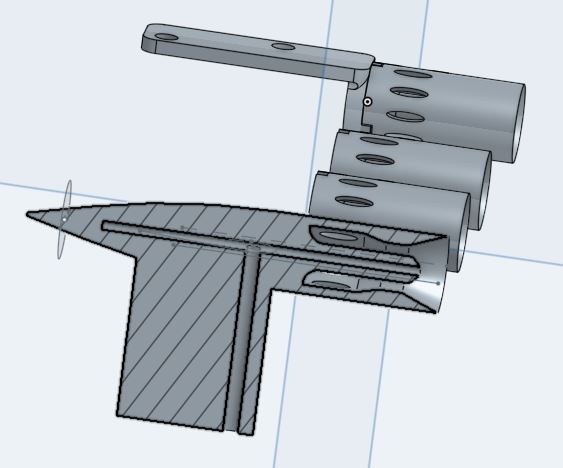
https://grabcad.com/library/kiel-probe-1
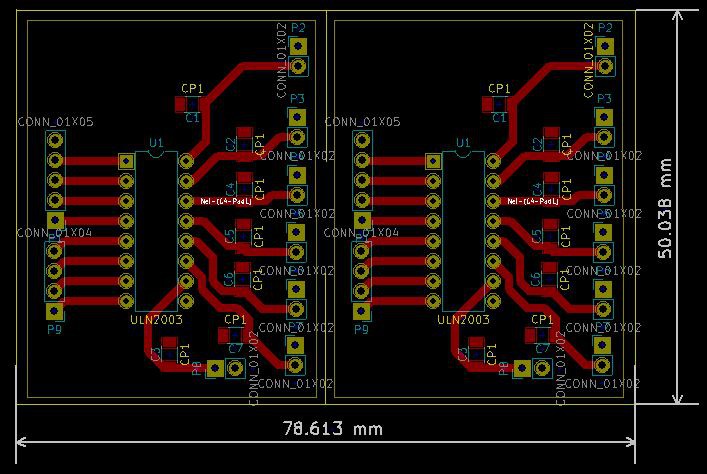
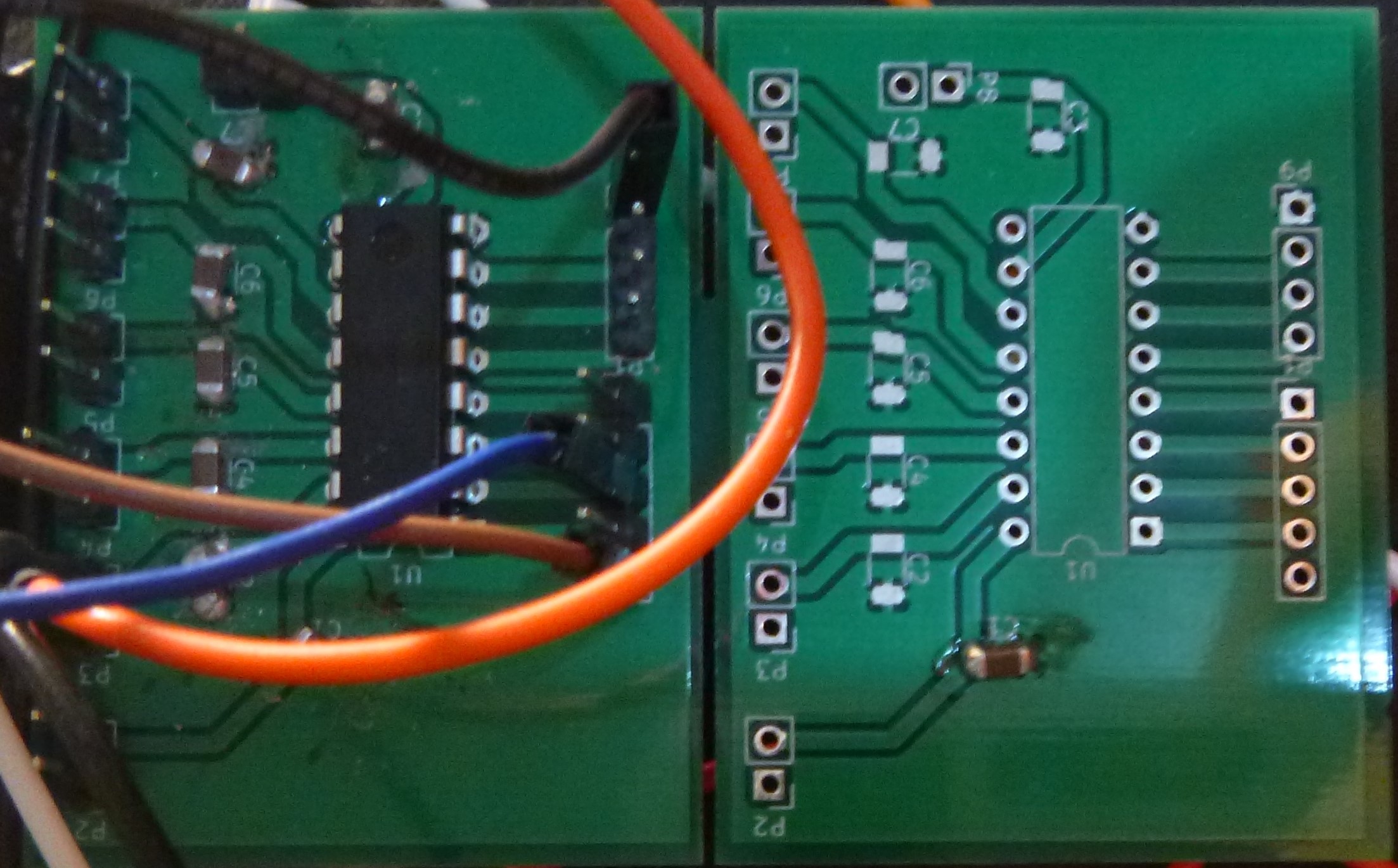
The Solenoid Driver
A current work in progress, the drive take the simple and relative inexpensive 6V one way solenoid and drives an array of them via the digital pins of an Arduino. Could definitely do with some more capacitor it works ok. But, it does the task of prototyping away from a bread board.


 chris.coulston
chris.coulston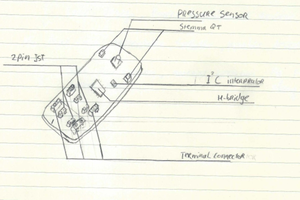
 Inne
Inne
 Amitabh Shrivastava
Amitabh Shrivastava