0%
0%
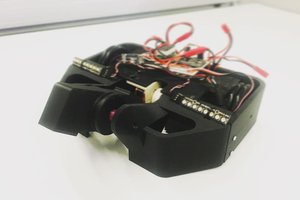
omni wheel mobile robot
A plattform to experiment with an omnidirectional drive
 Malte Ahlers
Malte AhlersBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Rogue
Rogue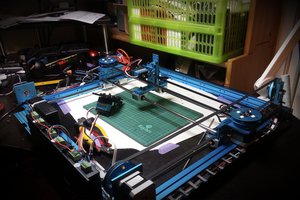
 Jensa
Jensa

 Ian Maday
Ian Maday
I discussed this with friends once and wasn't sold on the answer. In your opinion, with your triangular wheel placement, in order to drive in a direction parallel with wheel A at speed x, should wheels B and C each be powered to drive at speed x or should B and C each be powered at speed y, where y would be the value representing the sides of the isosceles triangle formed by wheels B and C (the line connecting B and C being the base of the triangle) and x is the height of said triangle? If this makes no sense then i may be able to produce a picture.