 David Sanchez Falero
David Sanchez Falero
Drakkar is an open source low cost printable robotic prosthetic leg. I started with this model because I could not find any printable and modifiable prosthetic leg and the ones in the market are so expensive.
This project is available on Github, where you can see all files and the last updates.
Whit this ideas, I developed the first model, Drakkar D1. In this model I use a knee mechanism inspired by the passive prothesis.

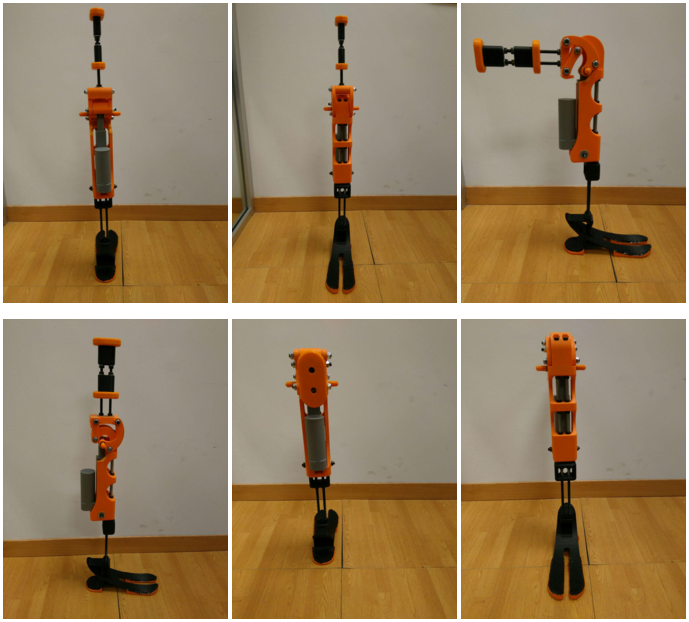
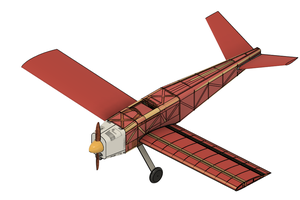
Drakkar Goat, first prototype.
When I obtained the correct size of the knee bar mechanism, I designed and made the Drakkar Goat.
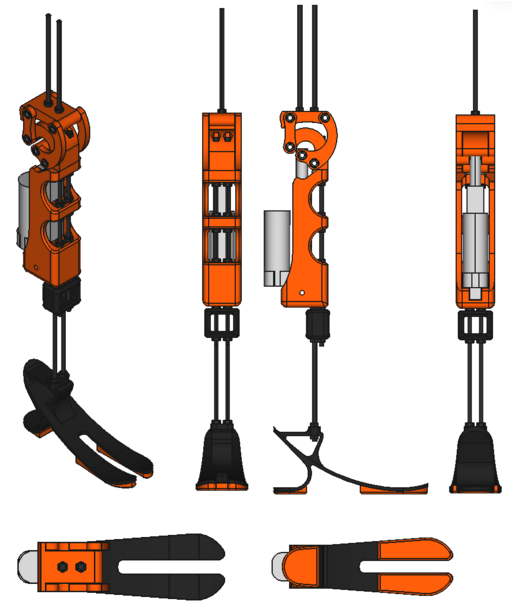
The foot was a problem because it was very fragile, so I modified the human model and create a new one inspired by the goat hooves.


When I tested this model, I saw that it had some problems. The first problem was the design of some parts, because this leg model cannot be resized to be used by children.
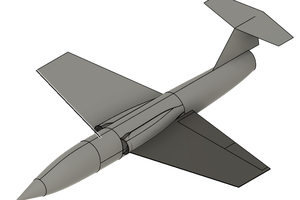
Drakkar N7, second prototype.
I changed the desing and created a modular leg with some basic modules with the electronics and sensors.
This model can be adapted to different motors, sensors and electronics. It can be adapted to the user height too.


Human model
Original design of the human model: Jarde Dummy by Jari Ikonen.

Drakkar N7 Anvil
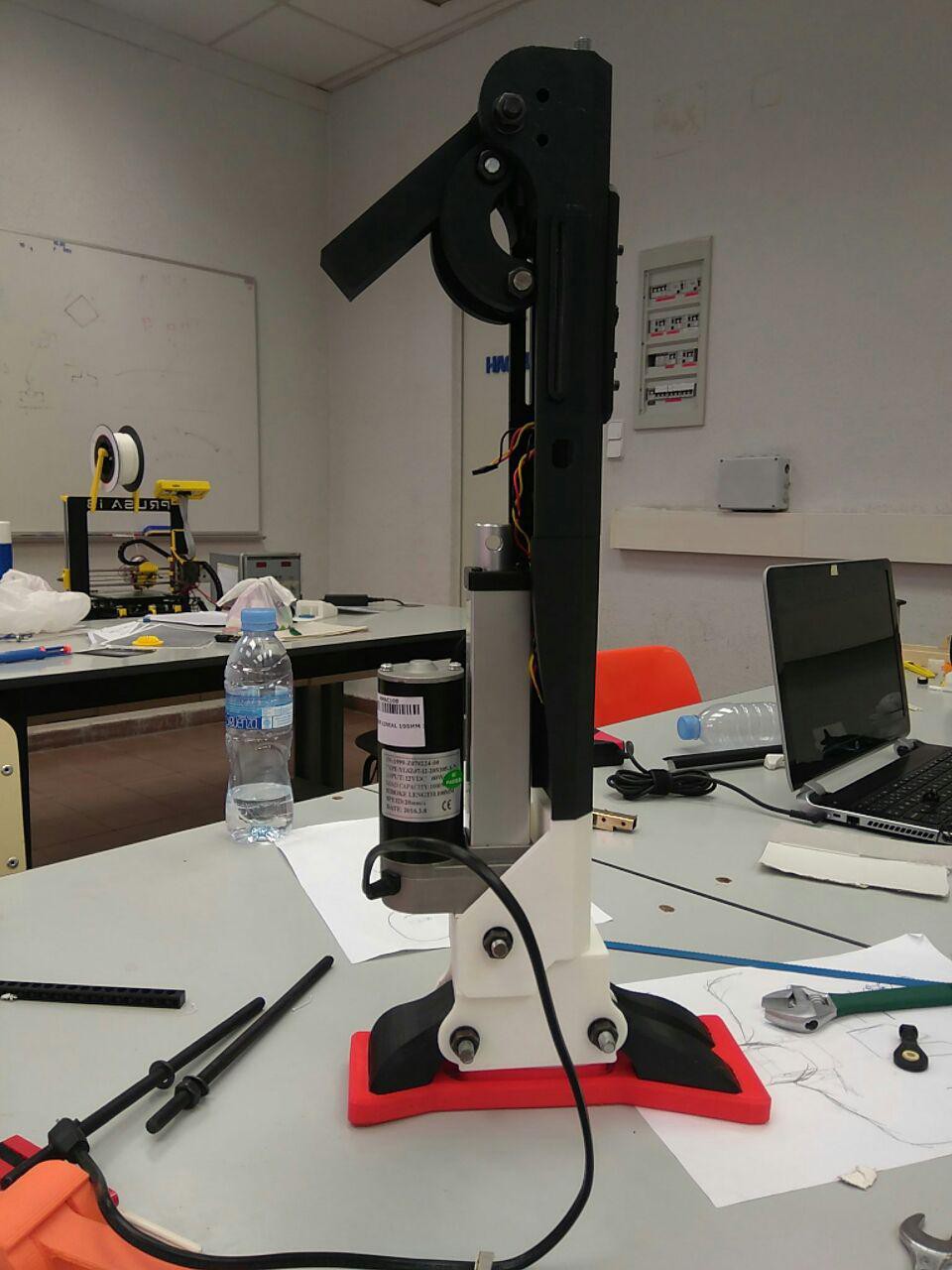
Right now I'm working on electronics and software for reading the leg muscles to control Drakkar.
More information coming soon.
Drakkar has been sponsored by BQ untill March 2016.







 Davide Cagnoni
Davide Cagnoni
 Aractapod
Aractapod
Hola, David Sánchez Falero, ¿cómo estás?
Vimos su publicación sobre prótesis de pierna (https://github.com/davidsanfal/drakkar) y nos gustaría saber qué tamaño de actuador lineal se utiliza. 50 mm o 100 mm?
¡Aprecia tu atención!