0%
0%
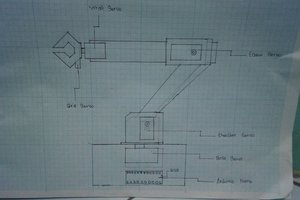
Humanoid robot
My most complex project so far - an adult size humanoid robot.
 Malte Ahlers
Malte AhlersBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Muhammad Syaiful Anwar
Muhammad Syaiful Anwar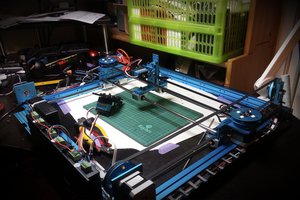
 Jensa
Jensa
 tab
tab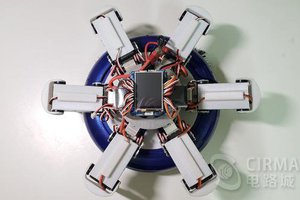
 Cirmall
Cirmall
This is so cool! Do you have any plans to continue making it?