 Neil K. Sheridan
Neil K. SheridanThis is my idea for the robotics module challenge of the hackaday prize 2018! Really it has come about because I wanted to turn a raspberry pi robot into a robot avatar that I could let out of my door and travel around 'in' through the streets!
Initial goals for the project:
1. Transmit live video from robot avatars to the base stations over long-distances (1km from base station) using cellular and RF
2. Transmit commands to the robot avatars from the base stations (e.g. to turn/stop override autonomous movement). So we can do this via RF with a 433Mhz Serial Transceiver too.
3. Allow a variety of communications methods to be connected to the communications modules as plugins (e.g. cellular, RF, laser)
4. A simple application UI to combine video received from robot with movement control command sending. This could be as a webapp too. Using a gamepad for movement control would be good.
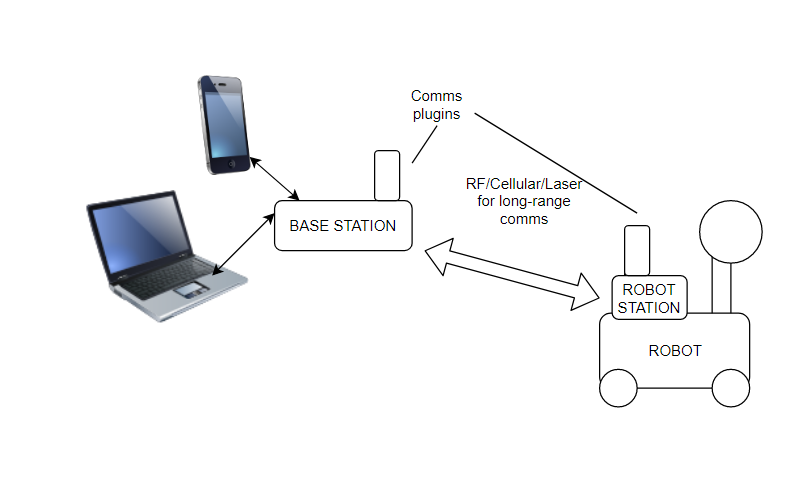
Since it is a module for robots, I don't want it to be a main part of the robot! The robot station part of the module will be able to communicate with the robots using their wifi chips. In fact, the robot stations need not even be mounted on the robots. They just need to be in proximity, if your robot is going to be operating in a fixed area in range for wifi.
PLUGINS FOR COMMUNICATION METHODS
1. Cellular (4G/5G)
2. RF
3. Laser
PROBLEMS
Well the main problem I can think of so far is transmitting video via RF. T
For city environments, in which we have 4G/5G, we could transmit HD video from the robots and even have VR for the UI. So giving VR robot avatars that could explore all around the city! If the robot had hands, we could even give haptic feedback via the UI! So that's where I will start, and move on to the more difficult RF stuff next, and even laser!
UPDATES:
I'll put my updates here in chronological order from the start! There are going to be many changes of mind when I learn more, and as I go through prototypes!
Prototype for the robot station: https://hackaday.io/project/109378-robot-communications-module/log/133427-robot-station-design
RF comms plugin https://hackaday.io/project/109378-robot-communications-module/log/135300-design-of-comms-plugin-rf
31/03/2018: --RF plugin-- I've decided to use 2.4Ghz for the video transmission on the RF plugin, and use 433Mhz [serial] to tx control commands to the robots and rx telemetry. So both of these will be incorporated into the plugin. I should clarify that we expect to use RF in non-urban environments. Thus, there will be no clutter on 2.4Ghz, no reflections from buildings, and we might even have LOS (line-of-sight) to the robots! I think also, I will have to make repeater stations, if we want to get data rate of 500Kbps+ for video, when our robots are several km away from the base stations!
06/04/2018: --RF plugin-- Now, I'm thinking of using WiFi for video transmission https://hackaday.io/project/109378-robot-communications-module/log/139889-wifi-for-video-transmission-on-rf-plugin-wlan-which-antenna



 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠
 Keith Elliott
Keith Elliott
 Radu Motisan
Radu Motisan
A project that I follow with attention of course