 kirrent
kirrentI'm choosing to license everything in this project under the open source hardware license (OSHW).
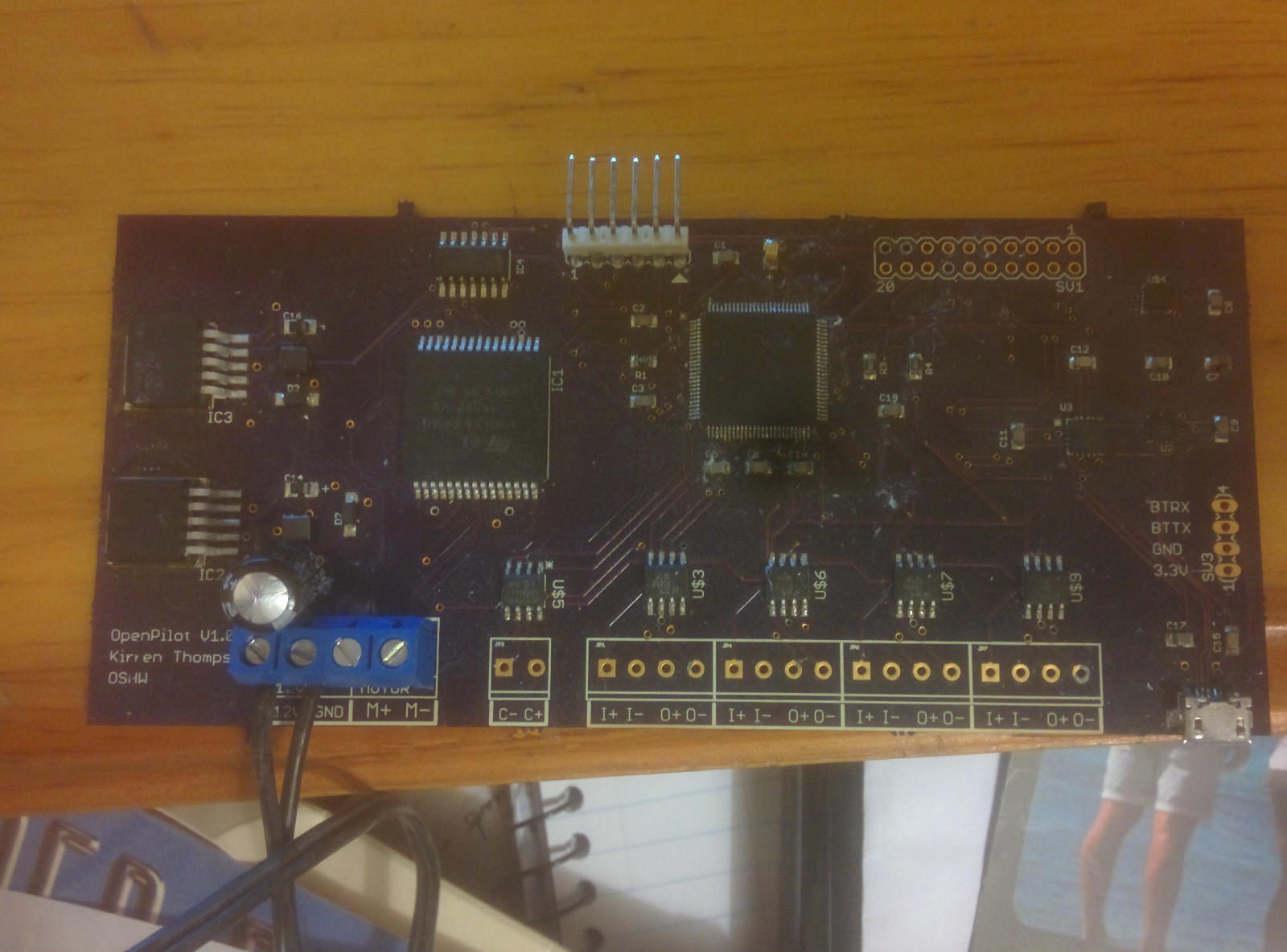
This project is actually a complete revision of another marine autopilot I was making. That brought my confidence in my soldering skills back to earth. It had a pretty high part count, a few of those terrible MEMs sensors packages, and a large fine pitch micro. It took a long time for me to get it working but when I did I found there were plenty of things I wanted to change, heaps of ways to simplify the design, and I found out that I hated Microchip's 32 bit software ecosystem.
Playing around with the STM32 ecosystem on the other hand has been a huge amount of fun so the new version's going to be using that. I'm also going to be trying to reduce the part number and board size as much as I can, use some better sensors, and see if I can get a couple of the boards built at Macrofab so I don't need to deal with the more annoying packages.
For me this project is more of a platform. I want to get the electronics out of the way with a board that's reasonably versatile so I can play with it. Programming a quad is fun, and I'm looking forward to having just as much fun with a boat. For example, do you need a wind vane to do effective upwind sailing or can you do it with an anemometer and GPS? Can you limp on without an anemometer? The possibilities are endless. Given a wind direction how well can you replicate a human in steering over waves or surfing down them? Can you steer for 5 minutes and have that be enough to get the autopilot to hold your course and have adapted to the conditions?
I guess I probably need DFU as well.

 Jarrett
Jarrett
 Casual Cyborg
Casual Cyborg
 Justin
Justin
 Jonathan Kelly
Jonathan Kelly