 David Brown
David BrownWell the v1.0 board arrived from OSH and was duly populated. It took me a while to put together the SPI code for testing with the Arduino, but got there in the end.
Whilst trouble shooting why nFAULT was being pulled low managed to short one of the drivers, so removed it. I noticed that some of the pins had not been making full contact so fluxed the remaining chip and re-soldered the joint. After this the motor ran successfully, with varying torque settings and full step range from full to 1/16th
The chip runs reasonably cool, hot to the touch, but not scorching. I am making some adjustments to the board to allow the address to be changed (x4 options) and to modify the fault, enable and sleep lines. The TOFF selector will be moved to a soldered setting on the board
Board files to be uploaded when further testing completed.
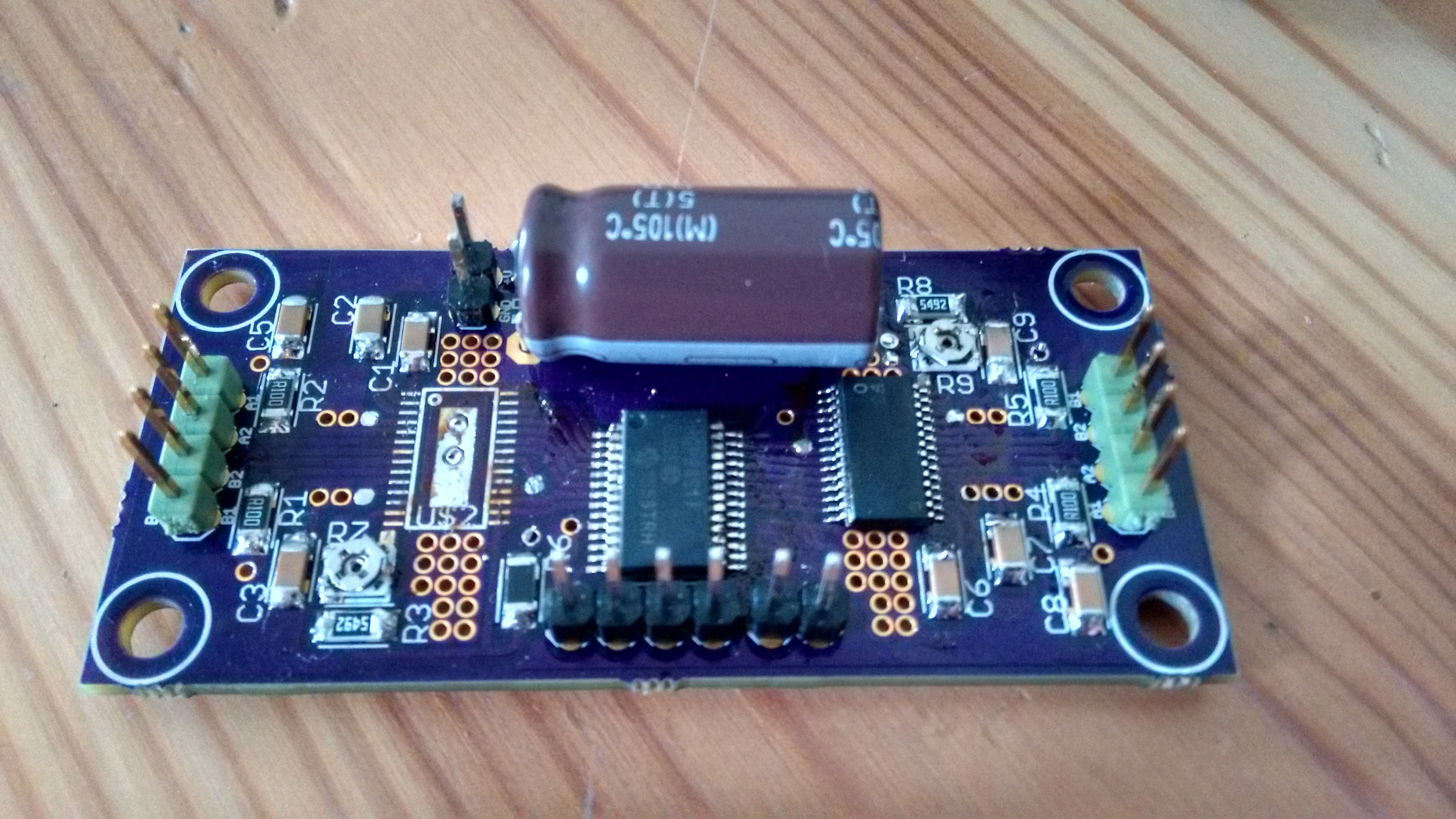
Fig. Populated board (x1 driver removed)
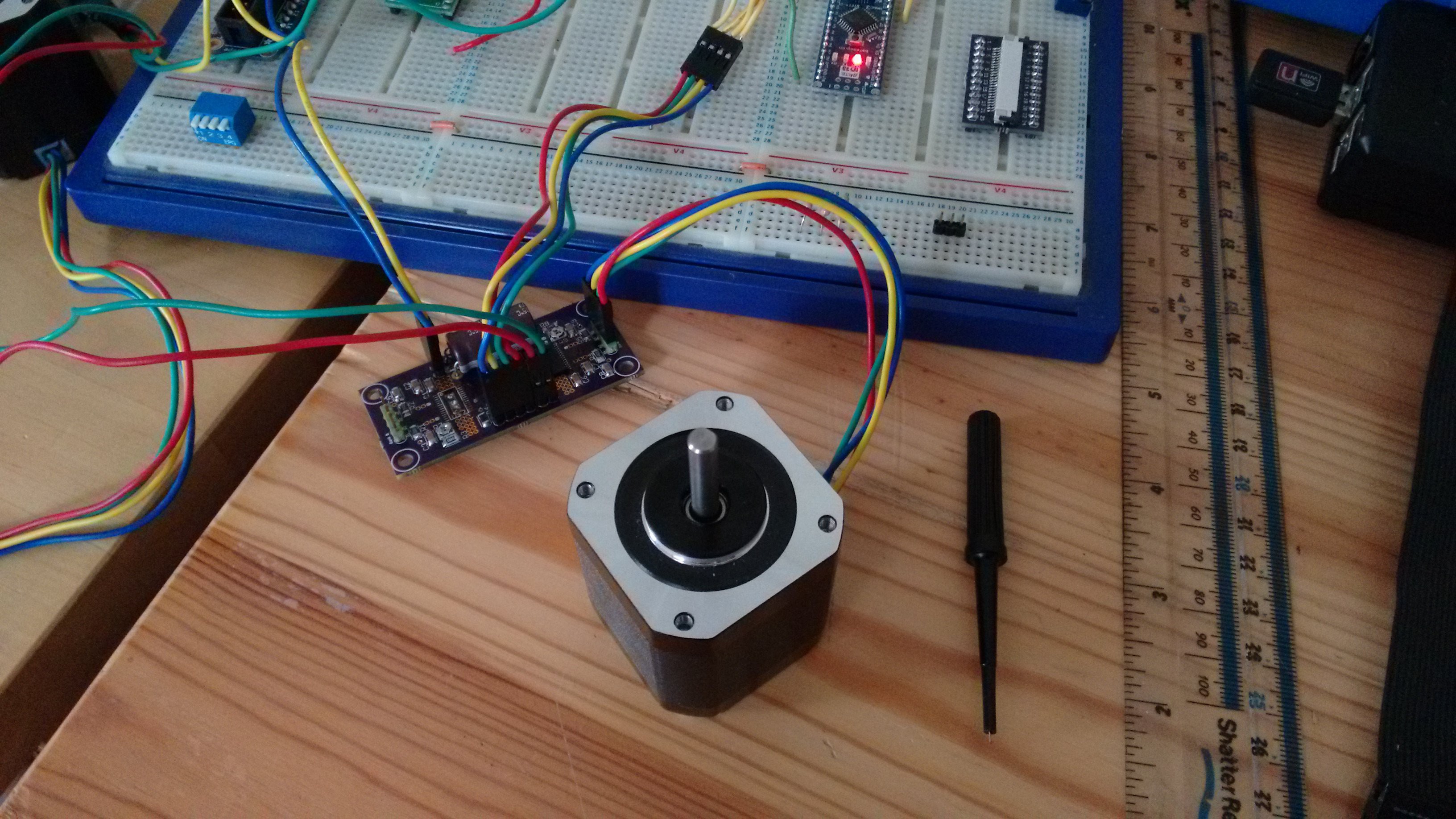
Fig. Connected to Arduino & stepper
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.