 Joshua Elsdon
Joshua ElsdonHello,
Whilst it seemed a good idea at the time to make a new project on Hackaday IO to cover the developments of the robots as a more or less mature project. It turns out I disagree with my past self significantly enough to go back on my decision. So updates will be placed here to keep the continuity with all the cool stuff we got up to over the last couple of years.
The robots are now in version 5.0. What upgrades did this bring? To be honest, nothing spectacular. We moved to having 2 upright pins for charging, this was to remove the faff of constructing the ground connection on the bottom of the robots. This was a very manual process and would not be able to be scaled. The upright pins also double as the shafts for the wheels, therefore they can charge on the shaft protrusions! What an enviable talent!
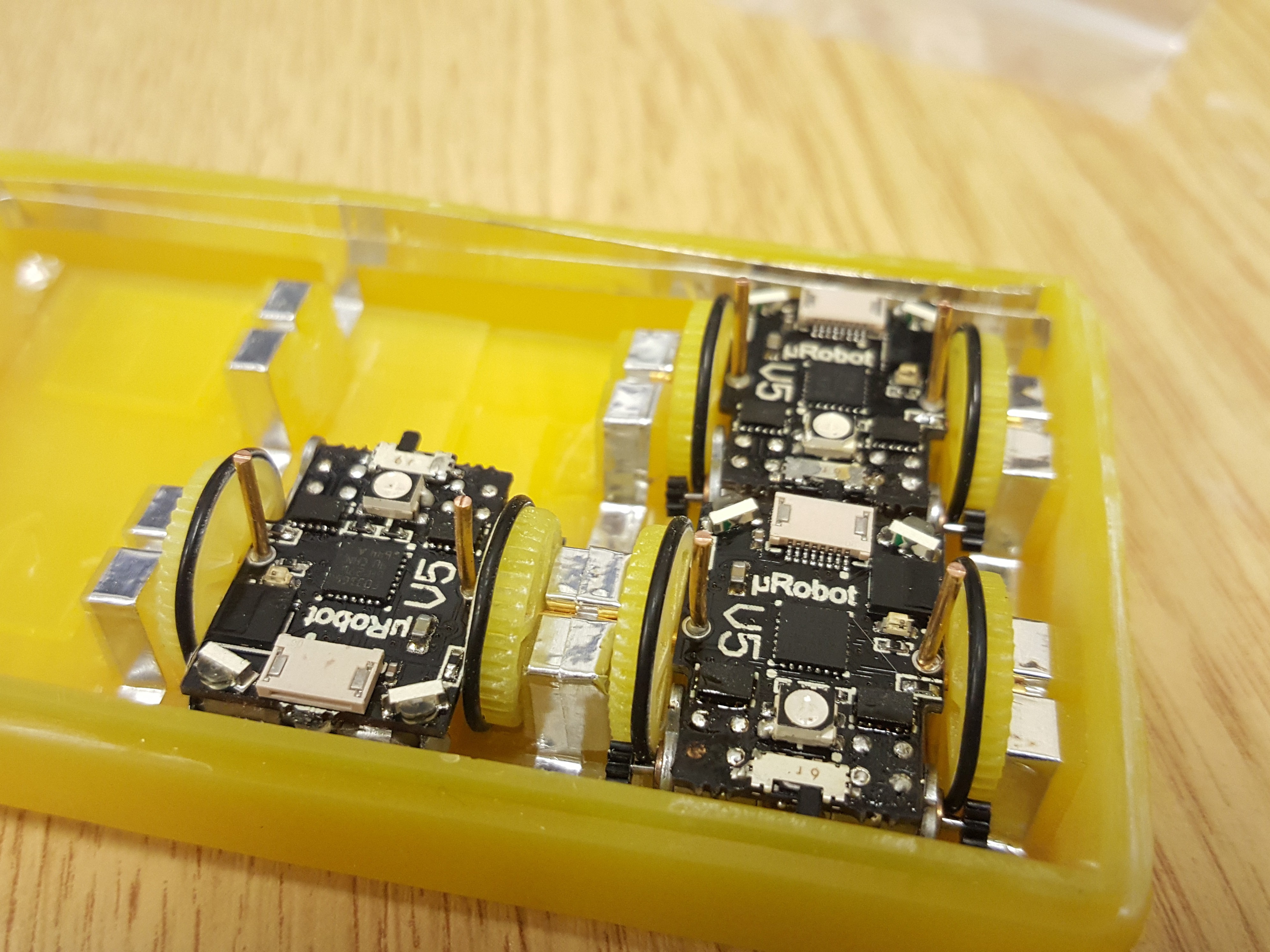
I made a little box that leverages this feature such that they can all be charged whilst in storage. Even little robots need a comfortable home. The other changes were just in the pins chosen for particular peripherals to connect to, as there was a mistake that one of the light sensors was not connected to a analogue capable pin, DOH!
Having surveyed some of the competing robots, it seems popular to offer an expansion system. Usually this is a row of headers with useful interfaces broken out. Luckily we thought of this ahead of time and broke the I2C pins out on the 8 pin programming header. So you can plug in the additional thing you need in there and you are done.
Wait, the end of that last paragraph was not convincing?! OK, I would admit there are not a huge selection of sensors that you can get off the shelf that will fit in that particular position, pinout etc. But we are on HaD, so why not design something.
I thought that the idea of having a laser scanner on the robot would be pretty cool for all of those micro SLAM projects that you are working on. Luckily Texas Instruments make a very nifty, and very small ToF distance sensor. It is called the VL53L0X. So sensor picked. Next we need to plug it in. On a bigger robot you could just use one of the many board to board connectors, or use a flex cable to a similar header on the daughter board. Unfortunately there is not space for such luxuries, so we need to find a more compact solution.
Luckily for my Thermal Watch project I need a flex PCB, so why not solve loads of problems with it all at once. Below you can see my design for a tiny folding front ToF distance sensor 'Hat'.
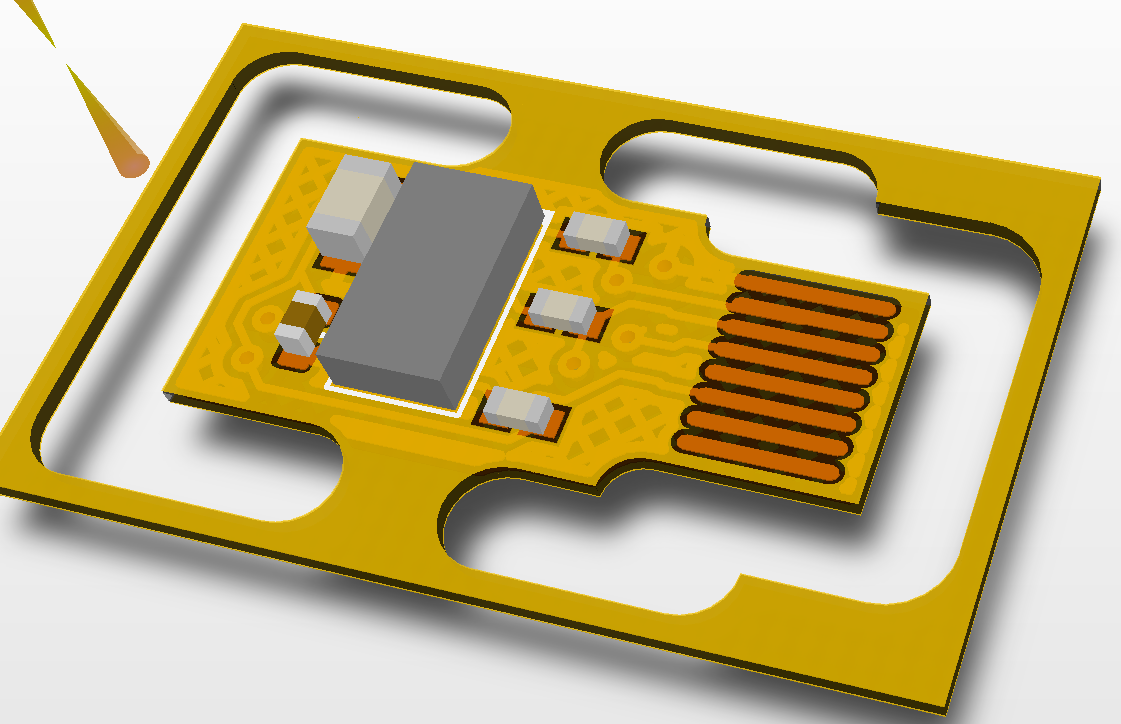
The surrounding parts of the PCB are just where it will panelise for manufacture, The centre piece will be cut free. The part will be plugged into the programming header and bend at 90 degrees such that the sensor faces forwards. Obviously this is not perfect as the sensor will have to be removed for reprogramming, though this is the price we need to pay to be able to fit upto 5 of these robots in our mouths at once. If you want to see a robot where you could perhaps fit 10 units in your mouth then check out my even smaller design here. << warning robot too small.
Version 6.0 is already drawn up and ready to send away. It has a super stealthy feature that I look forward to showing you all.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.