Basic outline of the CAD model is mostly finished. The fingers will be moved with a two-wire bowden cable system (chosen for their flexibility and ability to transmit mechanical force) which can effectively move the fingers in both direction - by pulling them from either up or down and forcing them to bend - without having to rely on springs to pull the finger back to default position. This also means the fingers actually keep their positions whenever the servos are not being rotated.
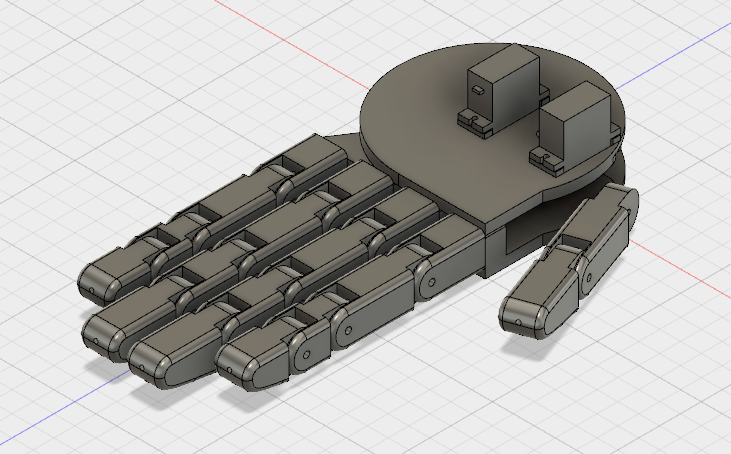
The fingers on their default position (Not final version)
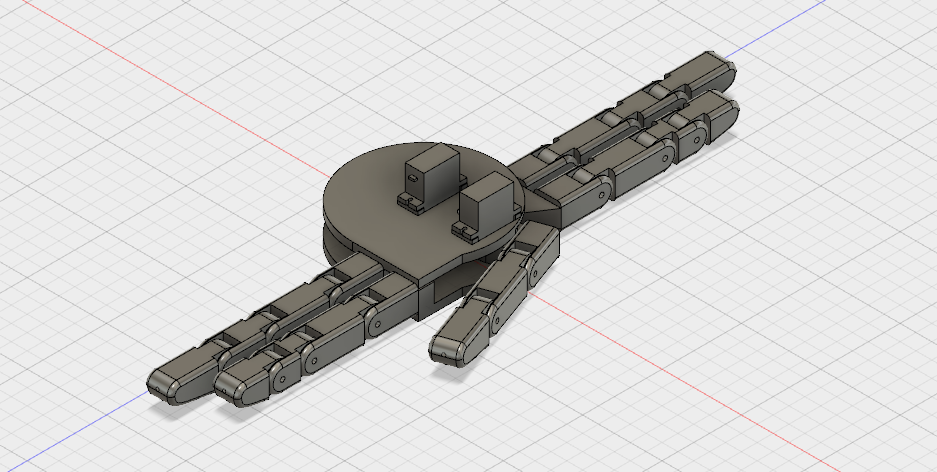
The fingers on the high torque position (Not final version)
The remaining features to be added are;
- Improved thumb connection piece
- The management of the wires that actuate the fingers
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.