The modifications necessary to mount the gripper to an existing robotics project has been made. It can be mounted using 4 M3 screws. The servos that are attached to the fingers with bowden cables need to be mounted to the existing project according to the design of the project. For example, for a humanoid search and resque robot, the sensible placement would be the elbow in order to shorten the bowden cable length, making them more efficient. Also cable routing holes have been added to the design in order to make the connection of the bowden cables easier.
The design of the first prototype of Robotic Hand With Interchangable Gripper Types (RHIG) is finished with these modifications. As mentioned before, i won't be able to physically produce the prototype. All the files will be available, also as mentioned before.
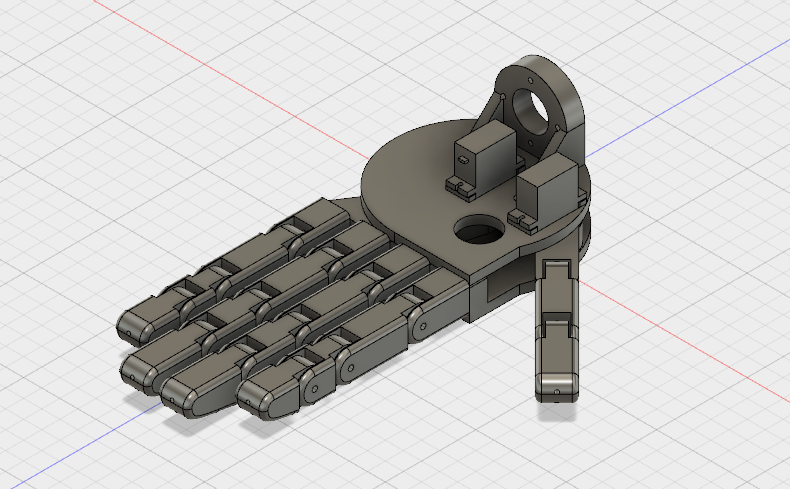
Final design of the Robotic Hand With Interchangable Gripper Types (RHIG) with the mounting bracket and routing holes
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.