After many hours of scratching my head I managed to confirm, that this is indeed the low speed oscillator that is not working. As previously stated, the communication between µC, and the BlueNRG works smoothly, but neither the phone, nor PC sees my tank / robot. So I reworked the tiny BALF-NRG-01D3 which is basically 0603 sized element with 4 BGA balls underneath, but this didn't help (It was OK every time I soldered it). Then I reworked the BlueNRG itself, which is in QFN package. I soldered the bottom pad with solder paste this time (application note stresses this out, but I didn't pay attention the first time). I reworked the low speed crystal, still nothing. And then I removed the crystal and, connected SXTAL0 to 32768Hz sine signal from my generator (1V amplitude, 500mV offset i.e. from 0 to 1V). SXTAL1 is left unconnected. And it worked, and I am super happy about that, because I was able to verify my theory, that this is this stupid LSE. I have numerous options now:
- Redesign the PCB according to all the application notes which I threw away earlier.
- Try with another low speed crystals.
- Reprogram the BlueNRG so it run on internal ring oscillator (I bricked one chip so far, more to come).
![]()
Option 1 is most proper way to go, but due to lack of time, I'll try option 2 for now.
 lukasz.iwaszkiewicz
lukasz.iwaszkiewicz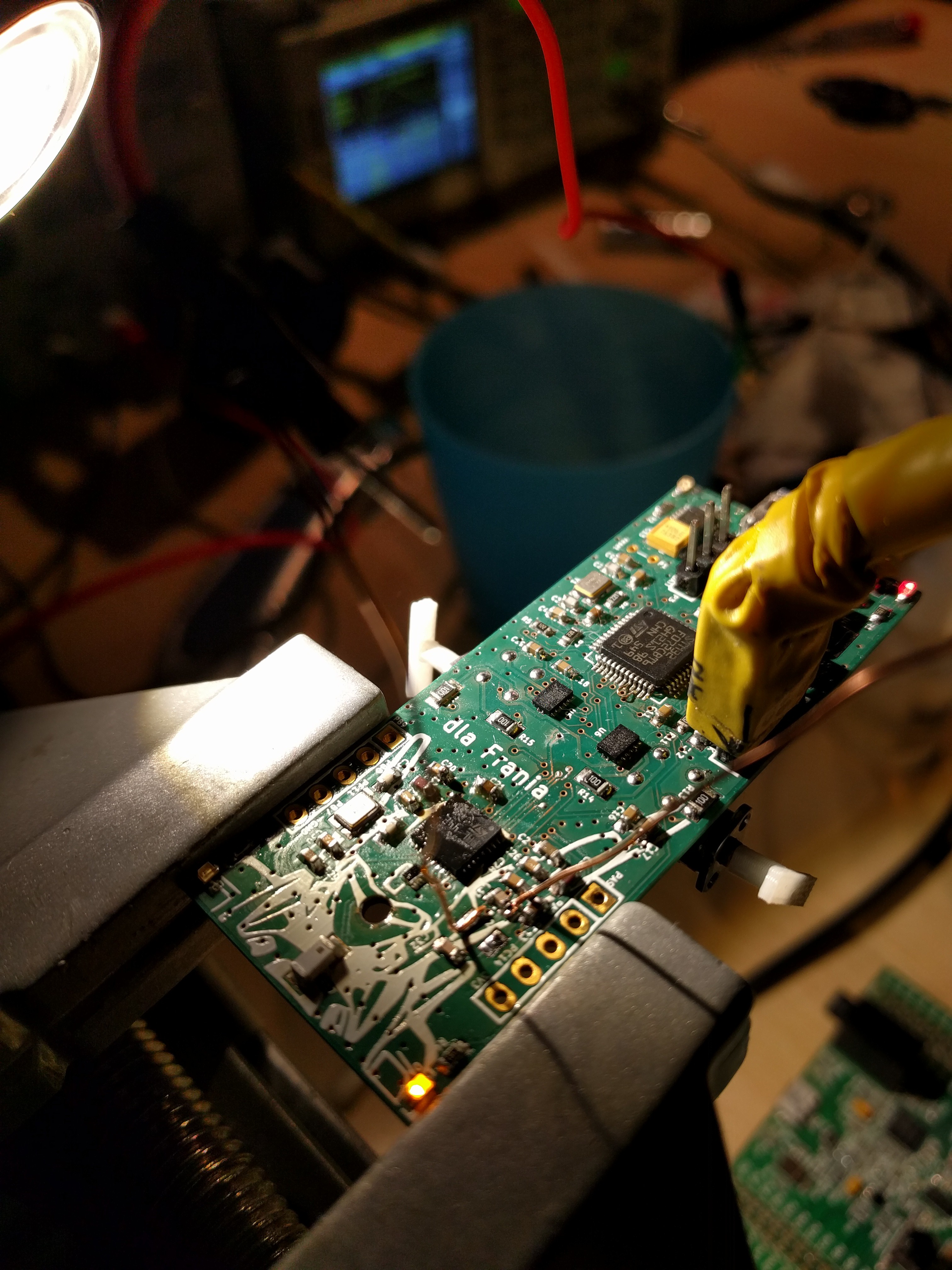
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.