 AVR
AVRThe name of this board is a reference to a Kyuss song for those who are uncultured
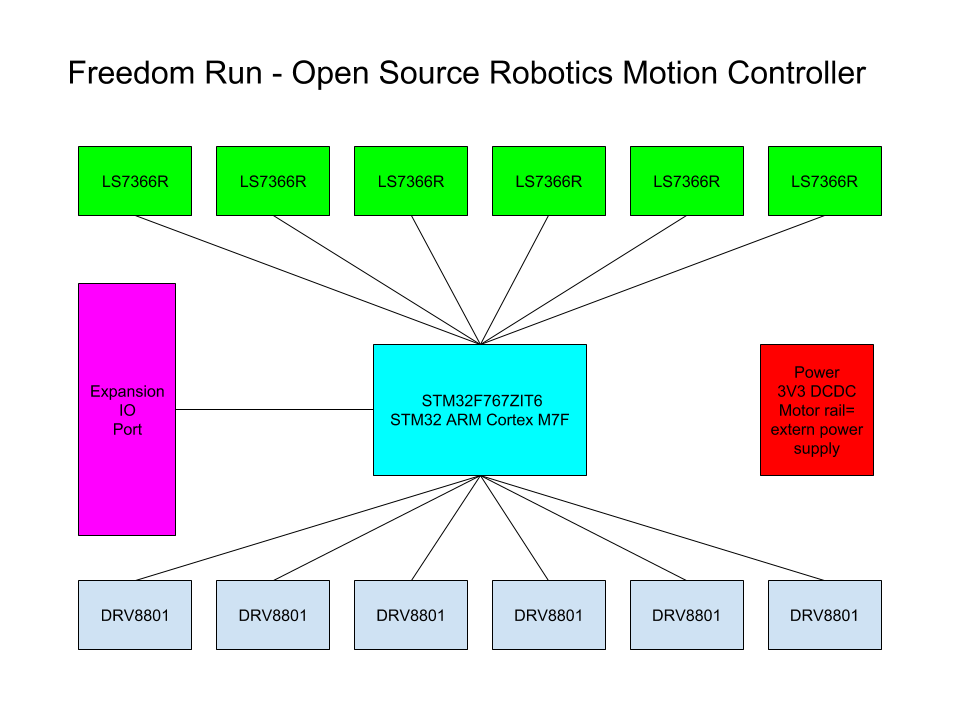
A closed loop DC motor controller for building industrial robots for open source production lines.
Quick Specs:
- STM32F767ZIT6 - STM32 ARM Cortex M7F IC MCU 32BIT 2MB FLASH 144LQFP
- x6 Ti DRV8801 H-Bridge with current sensing and limiting
- LSI/CSI LS7366R digital encoder interfaces x6
- Expansion IO port for specialized function
NOTES:- Two versions will exist, one with integrated drivers and encoder hardware and the other will be a multiboard system connected with differential signals. - Based on the STM32F767ZIT6 found on the NUCLEO 144 board: https://www.digikey.com/product-detail/en/stmicroelectronics/NUCLEO-F767ZI/497-16525-ND/6004740
 Oktopod Studio
Oktopod Studio
 David Gonzalez
David Gonzalez
 Ahmed Oyenuga
Ahmed Oyenuga
 Salah Missri
Salah Missri