 borazslo
borazsloThe stepper motor of the RoboCar Zero v1 worked well, but my car was fast as a snail. So I bough my first cheap DC motors. DC motors are easy to use - I thought. But...
1) These micro DC motors are very fast (13500 round per minute [rpm]), but they are very week. So I had to forgot to put wheels on the dual axel shaft. The strength (torque) is so low, that the motors stopped immediately.
2) When a motor cannot move (stall) it consumes much more power (current). So it drains the battery pretty fast. Oh, and it becomes veeery hot.
3) Hot glue is a useful material for temporary works. But it is not good for DC motors, because DC motors tend to overheat and that heat melts the glue. And even worth, the melted hot glue can flow into the inner parts of your small DC motor so it will never work again. Never. Even if you open up and clean all parts.
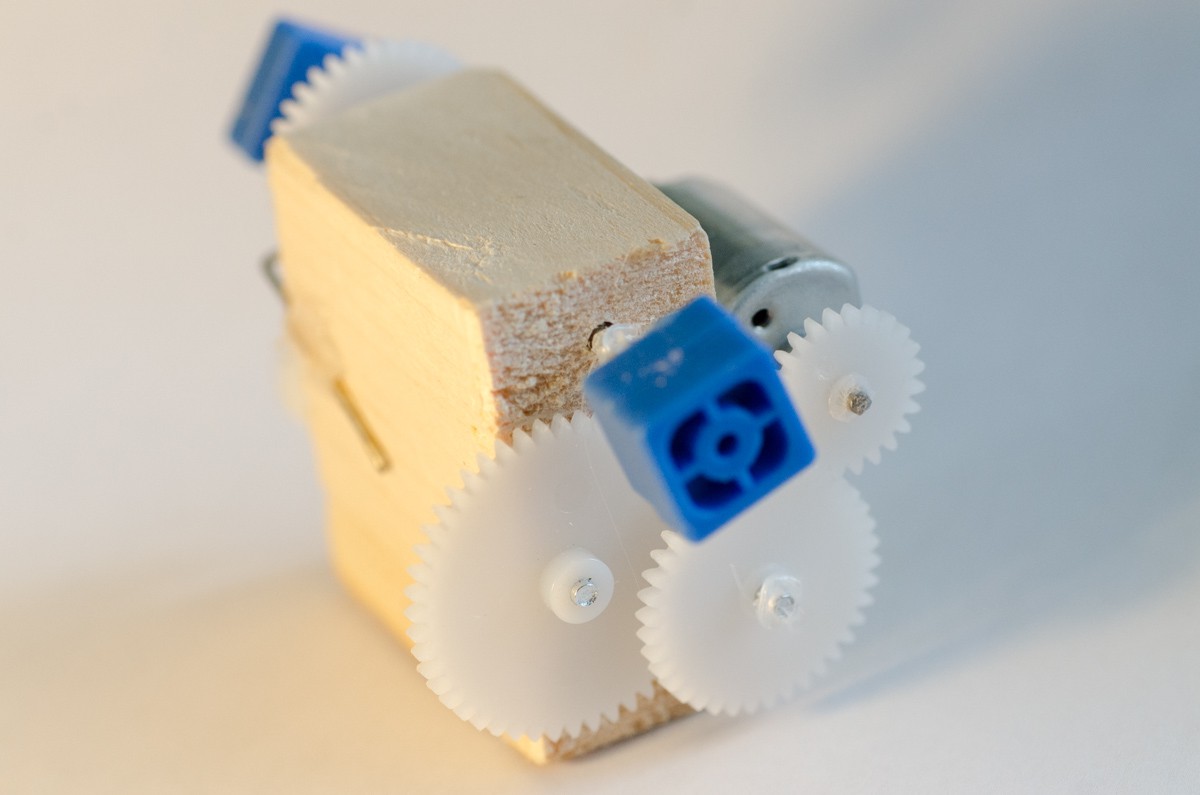
4) Gears are important to make your robot move. Multiple gears (from smaller to big ones) do not improve the torque of the motor itself, but they reduce drastically the unnecessary speed (rpm) and they multiply the wheel's strength (we need that so much). With gears, the wheel turns one when the motor turns more than hundred times. So you have the torque of hundred rounds of the motor in a movement of short inches ..
So you can choose: you struggle with micro motors and different gears, or you can buy cheap DC motors with built in reduces gears. I suggest to struggle with your own inexperience: it takes more time, but you learn much more. And the working gears are so beautiful and they make a nice sound as well.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.