 Oskar Weigl
Oskar WeiglRobot Arm and More
The ODrive project has been very fortunate to attract such a strong community of enthusiasts. Today we want to feature the excellent work done by Richard Parsons, who's been very active on the ODrive Community. In the video below he demonstrates his direct-drive robot arm, how he built and wired up the servo axes, his step/dir tests and finally his high speed pen plotter.
ODrive v3.4
Since the last newsletter update, ODrive v3.4 has become available. From a user-perspective, not much of the design has changed from v3.3. However, we now have a 48V version available. It has the same current handling capacity as the 24V version, hence it has twice the power. We are talking around 3kW peak power per axis.
We can't wait until the videos of projects with this kind of power show up!
New Encoder
We now stock the CUI AMT102 encoder in the ODrive Shop. This is a compact 8192 counts/rev encoder with index pulse. It comes with a custom 2m shielded cable that matches the pin-out for the ODrive.

The increased resolution will help with smoother motion and less "hunting" vibration when holding position. Also, in a couple of weeks, when we expect have the index pulse feature finished, it should enable the ODrive to restore the encoder calibration. This means that the encoder calibration only has to run once to commision the drive, and then skipped every run from then on.
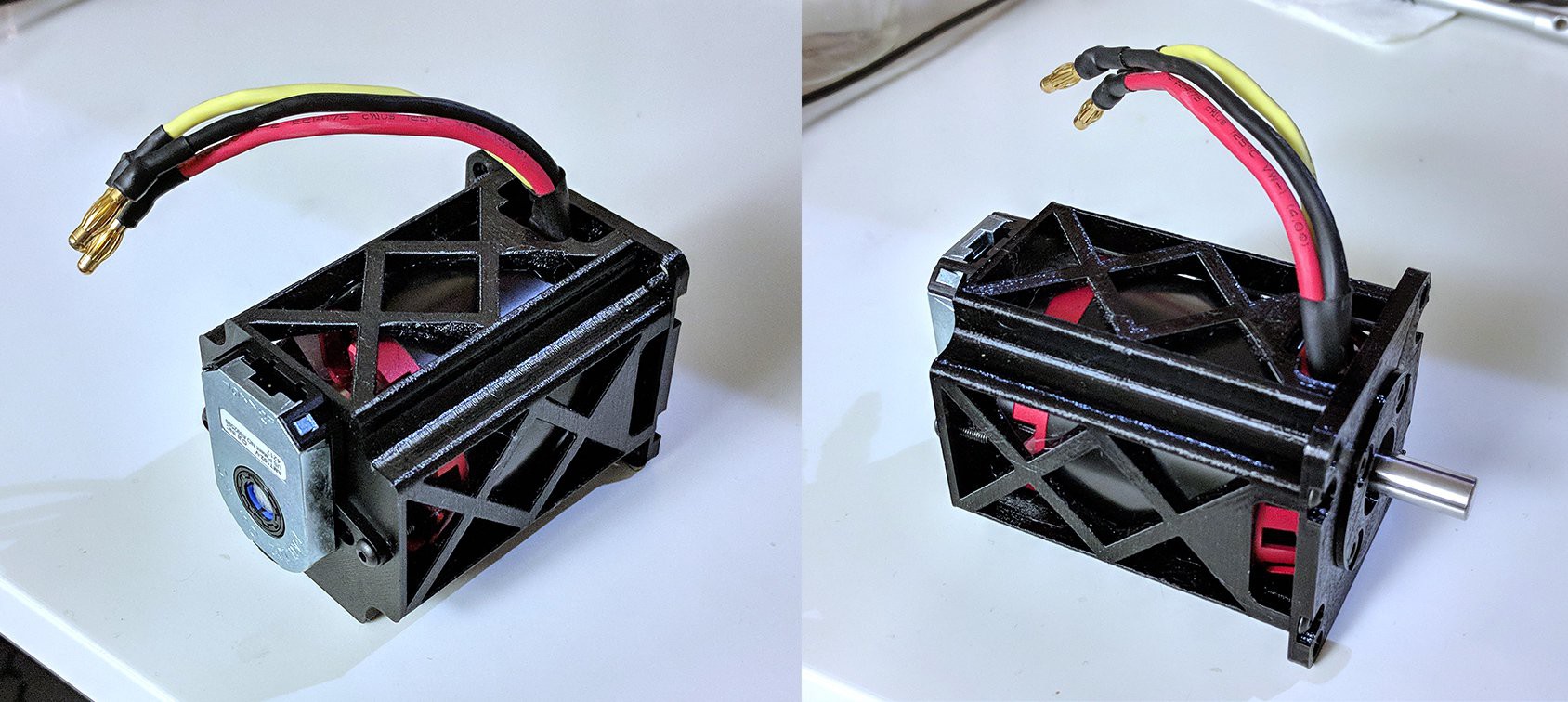
Above is a design by [Wetmelon] on the ODrive Community. It uses the 1.6kW N5065 motor and the aforementioned AMT102 encoder, to make a NEMA23 compliant compact and high performance servomotor. The above prototype is printed in PET-G filament, that has a glass transition temperature of 88C, so despite using a 3D printed part it should be ok for applications that don't run the motors too hot. If you are interested, he also made a design that uses a 10:1 gearbox, check it out.
Your Project
If you also have a project that you are working on that uses the ODrive, or even one that could make good use of an ODrive, we'd love if you shared some pictures with us.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.