 AVR
AVRStepDC is a simple board that contains an ARM Cortex M4 microcontroller and a H-bridge. StepDC converts stepper motor driver signals (Step, direction, enable, etc) into PWM and direction to drive a DC motor with the h-bridg. This will allow users to easily replace stepper motors with DC motors and encoders. The ARM on baord is responsible for running a PID control loop to drive the DC motor with the h-bridge using the encoder as feedback.
The hardware breakdown is simple for StepDC:
- STM32F446RET6 ARM Cortex M4 MCU
- Ti DRV8801 H-Bridge 8V-38V 2.8A
- Ti DCDC regulator of some variety
- Robust Phoenix contact connector for motor
- 2.54mm shrouded header for signals
- In addition to STEP signals UART, SPI, I2C, and servo PWM interface will all be available on the same connector.
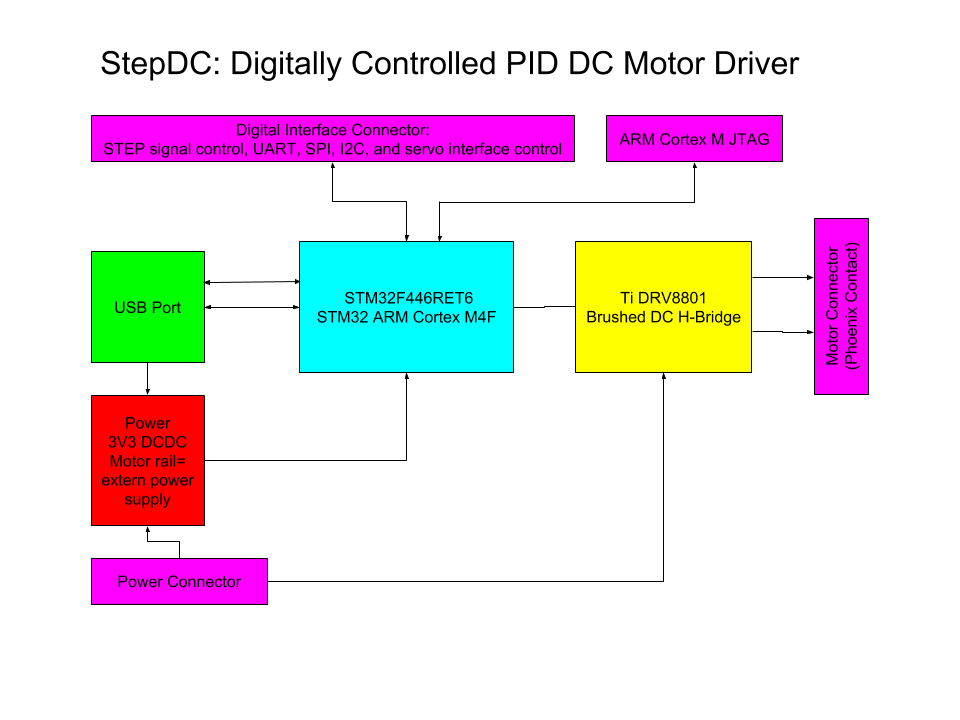
Above is a block diagram showing how all these components interface with one another to make up the described system. Its relatively simple, 3 ICs, connectors, and passives. One thing I should note is that I decided to include more than STEP signal control for the digital interface, so on the same connector, UART, SPI, and a PWM servo style interface will be available. This makes StepDC more than just a stepper motor replacement board, its now a universal closed loop DC motor driver with many digital interfaces, oh did I mention it will also have USB for PC based projects!
The reason to expand the feature set beyond stepper motor replacement comes from my background in robotics. Back in the day I attend WPI and studied Robotics Engineering so robotics and systems engineering are my thing. I wanted to exapnd the feature set to get back to my roots in robotics and the plan is to use StepDC on many robot based projects in the future! Also I just could not resist the robotics challenge so consider StepDC entered!
Stay tuned for more!! Next up I'm choosing components for the PCB!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.