Ben Rockhold
Ben RockholdFirst steps
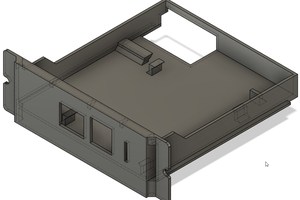
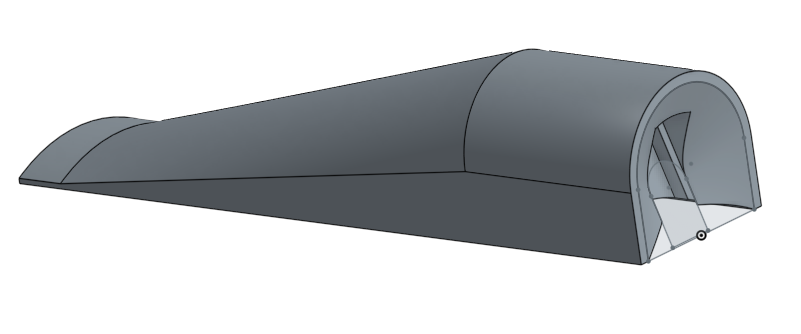
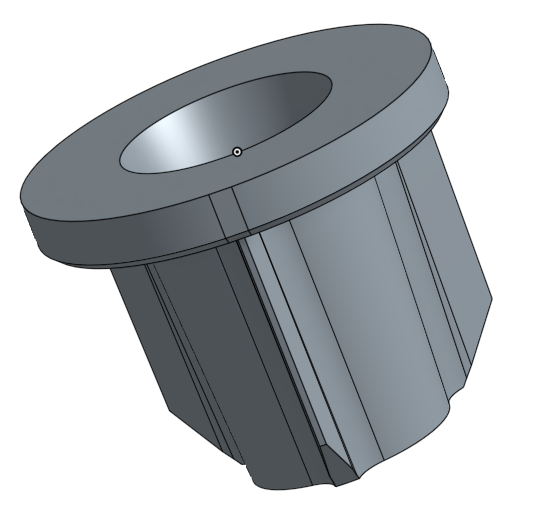
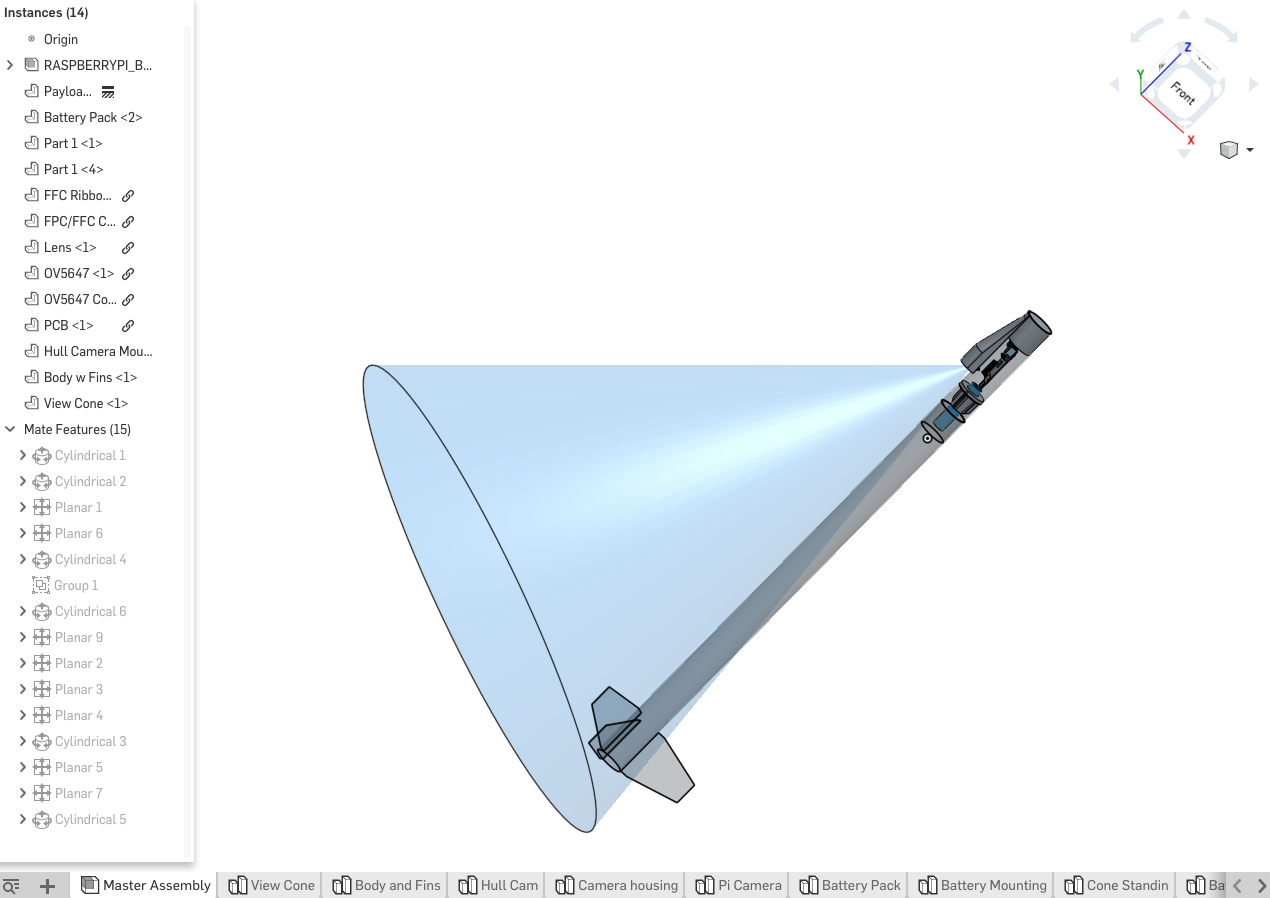
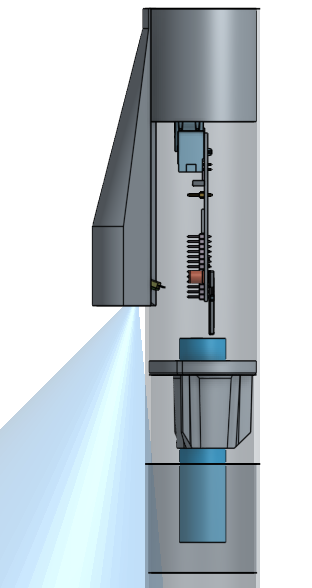
I approached this project by first mocking up my payload options in CAD, I took measurements of the rocket and used OnShape to build a 3D model of the relevant volumes. I then quickly drafted up the additional components; battery, camera module, and Pi.
In searching for appropriate payload electronics, the Pi seemed the ideal candidate; I have a couple of older models sitting around collecting dust, and they're light and reasonably durable. A USB webcam can be easily attached, as can USB storage. As it happens, the USB webcams I had on had were all very crummy, and the Pi camera module is quite good for $19.


 Arya
Arya

 facelessloser
facelessloser