 E. N. Hering
E. N. HeringHello!
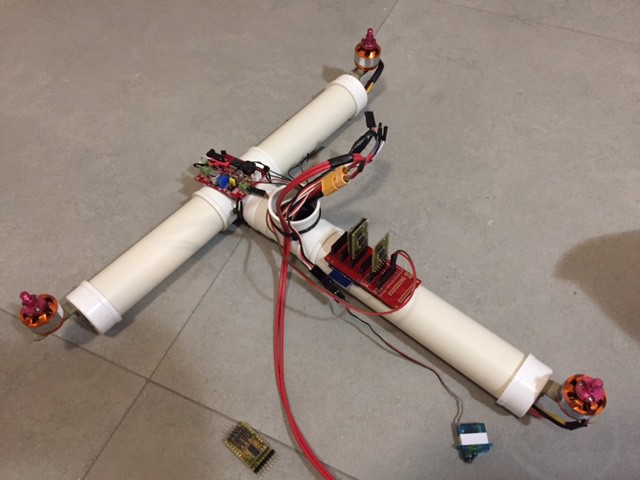
Today I managed to put everything done until now together, building what is now called the YAT: Yet Another Tricopter!
The thing has three electric motors, three ESCs, one servo, a switching 3.3V power supply (the 3.3v module is flawed), and the YAUVC backbone with some modules. This platform will work as a testbed for the servo control module and for the control algorithms that will try to make the YAT fly. Instead of the battery, I connected the YAT to a power supply via a cable. Communication to the YAUVC is done via WiFi. Here are some pictures:
Next step is to develop the code for the servo control module.
Soon I hope to come back with more good news.
And, if you want to follow this project more closely, you can join the @labvant.com Telegram group, where I'll be posting more frequent updates and pictures.
Thanks again for all your help and support!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.