 E. N. Hering
E. N. HeringAfter five months traveling at the back of a drunk snail, the components I ordered from China have finally arrived. Today I managed to assemble the servo control submodule and here is the first picture of it:
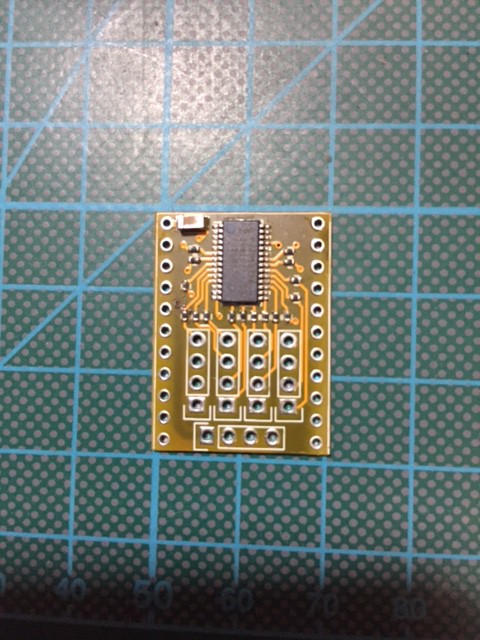
This submodule is controlled by the MCU module via a two wire interface (TWI). The MCU module talks to the rest of the system via a SPI interface available from the main bus. The submodule have 16 pins to connect to the servos. They are the ones in a 4x4 matrix. The four pins below them are connected to 5V and ground.
Having 16 servo plugs directly available on this PCB would make it too big to fit into the system. I decided to interface servo plugs with this board elsewhere. This will require some wires to be soldered to this board with male servo connections on the other end. The number of wires will depend on the required number of servos for each project.
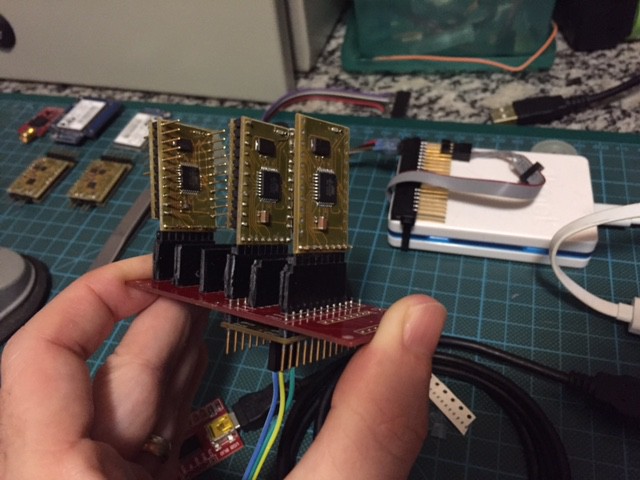
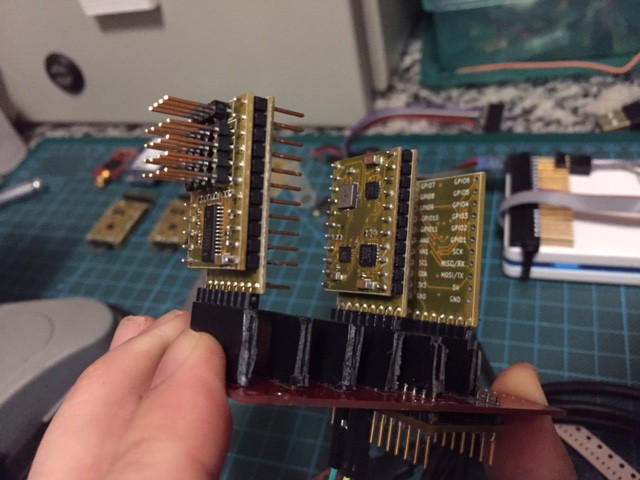
Below is a picture of the submodule connected to a MCU module.

The headers still need to be trimmed, I know. They will be soon. I'm now going to work on this module's code. As soon as it is working, I'll make it available in the project repository.
Thank you for your help and support. I'd also like to thank Hackaday.io for the help they have given to this project, and to many others, through their great work. I have received a message from them last week saying that the project was one of many awarded with seed money. This was great news for me!
Soon this whole thing will be piloting a tricopter, or a glider, or just a small wheeled robot. Or a flying toilet. Who knows?
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.