0%
0%
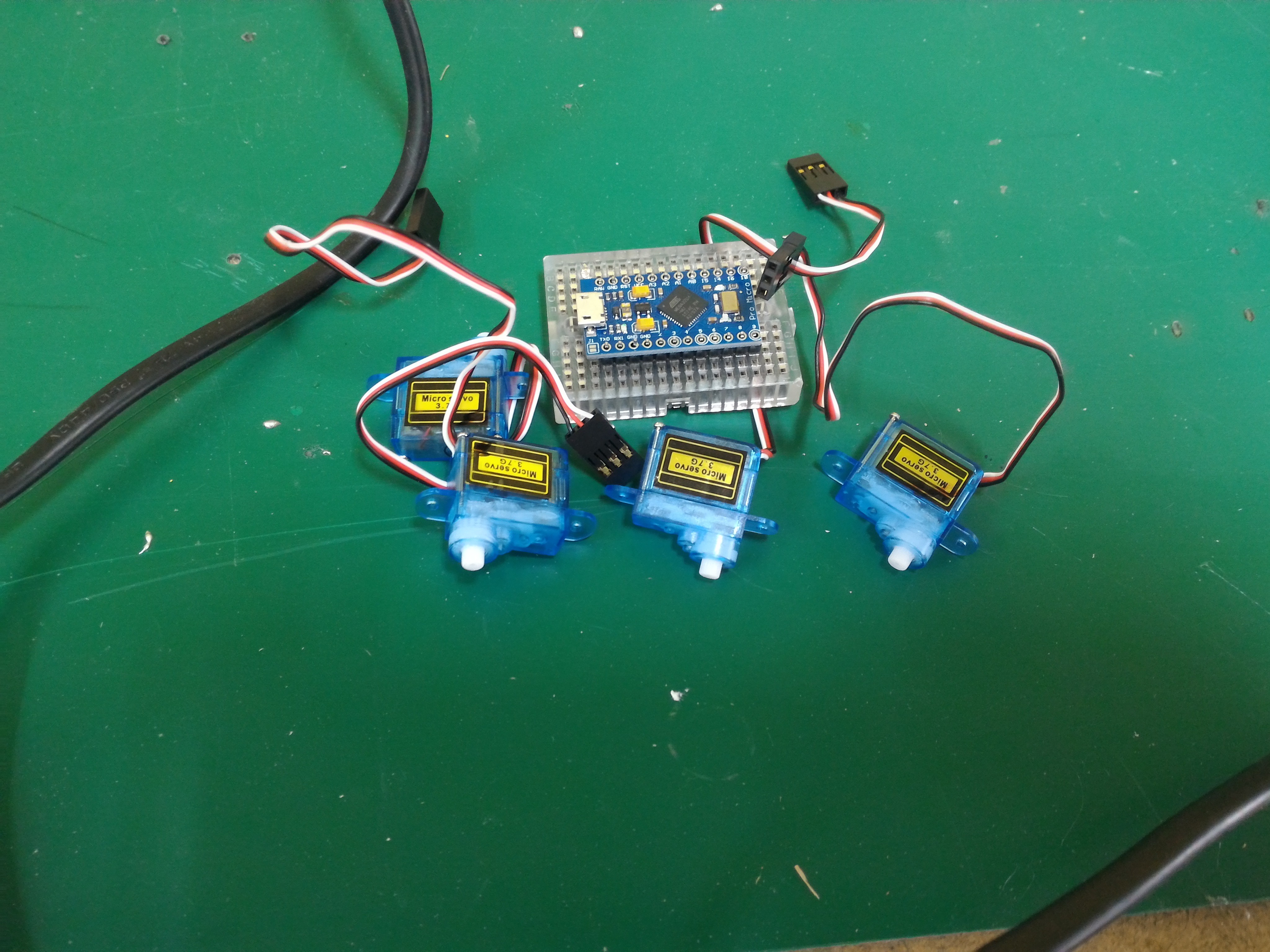
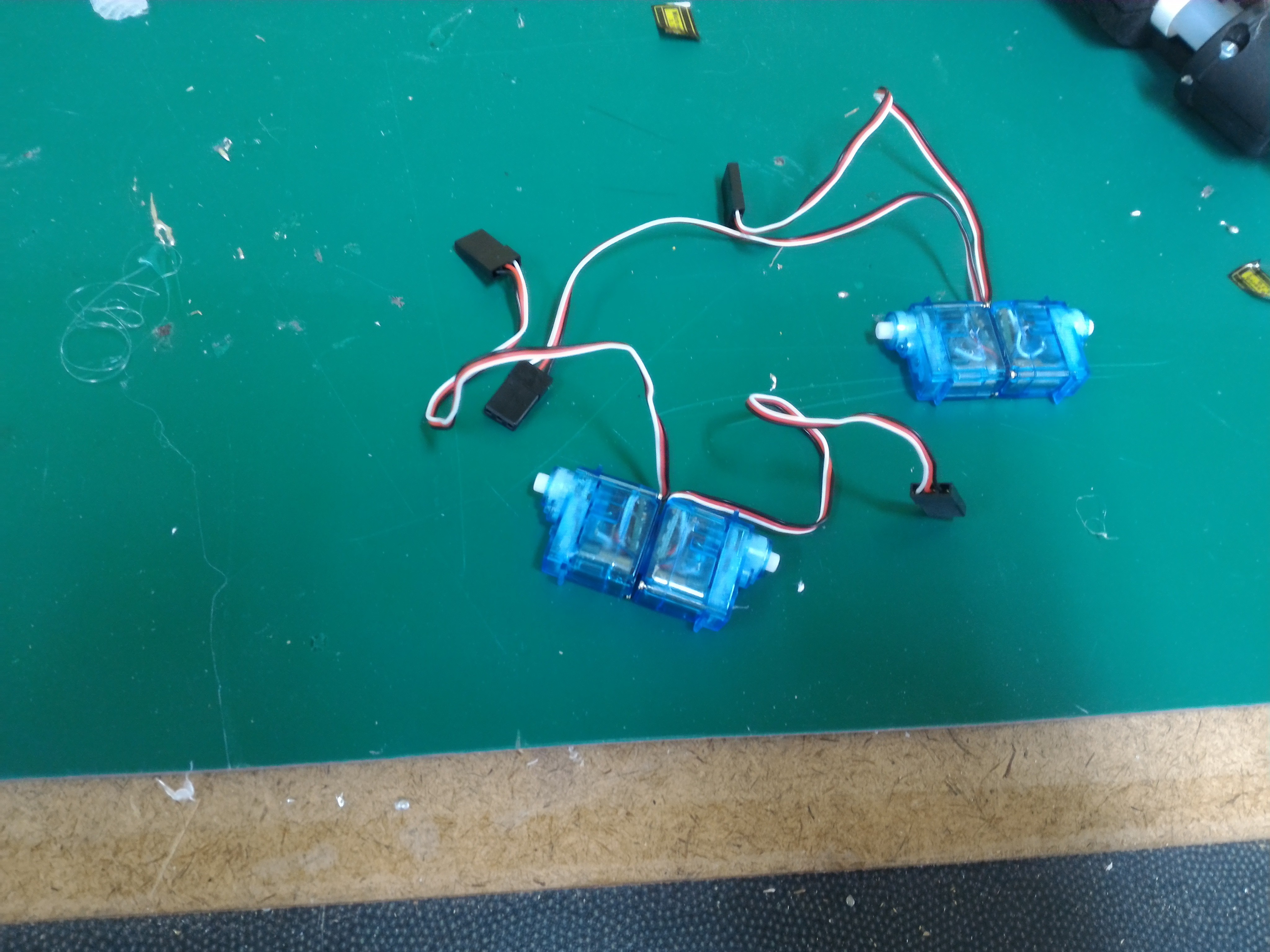
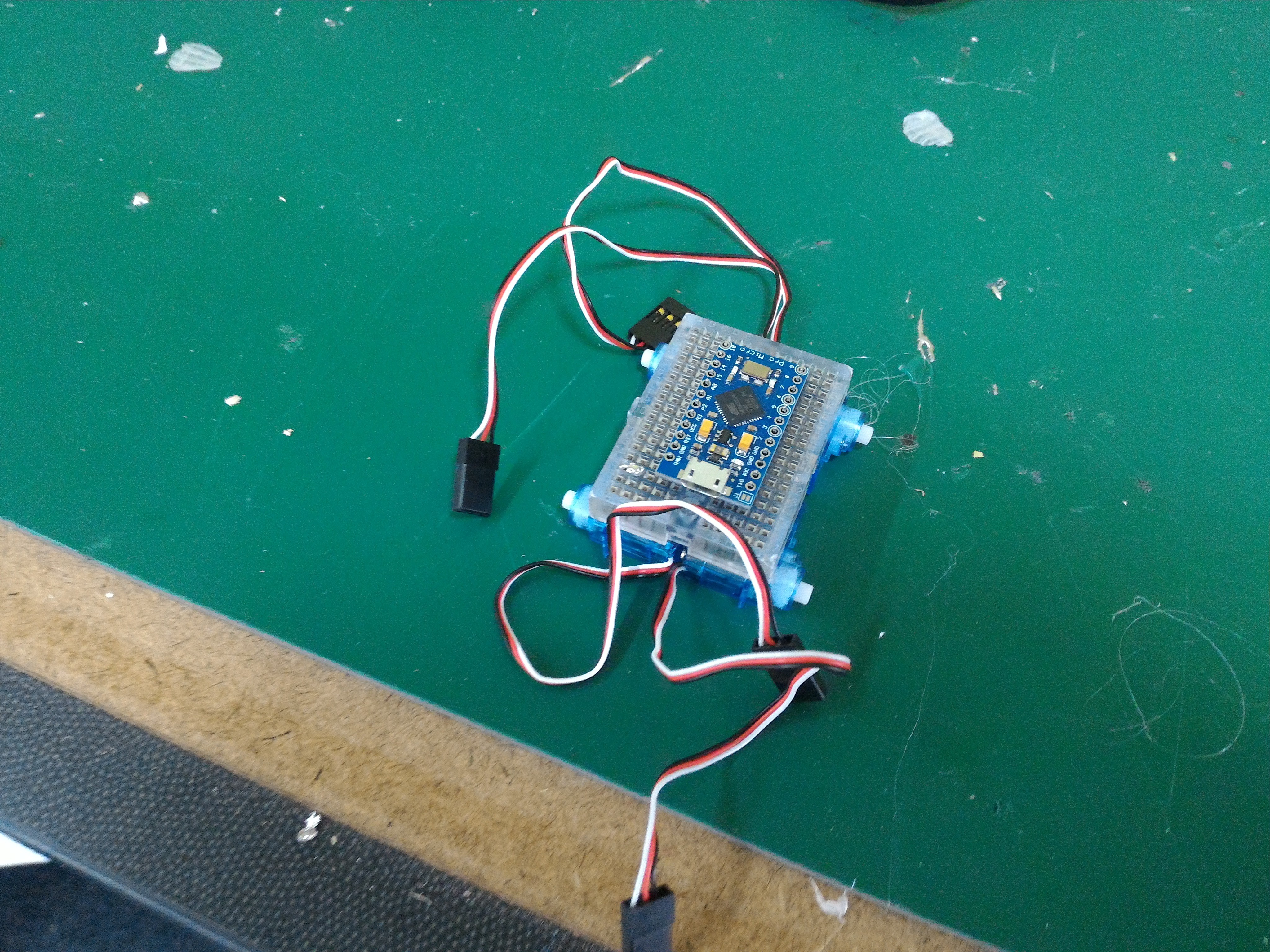
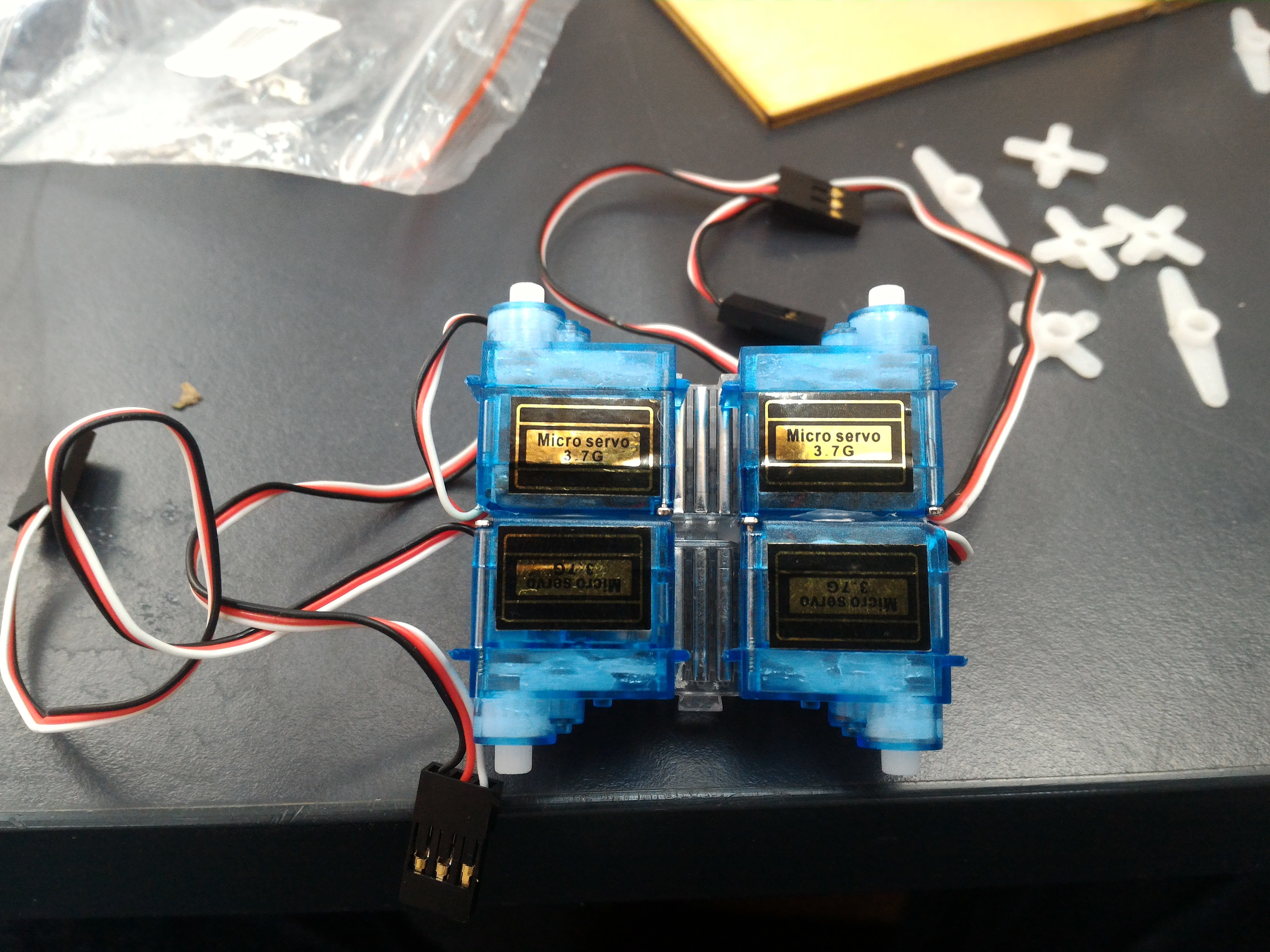
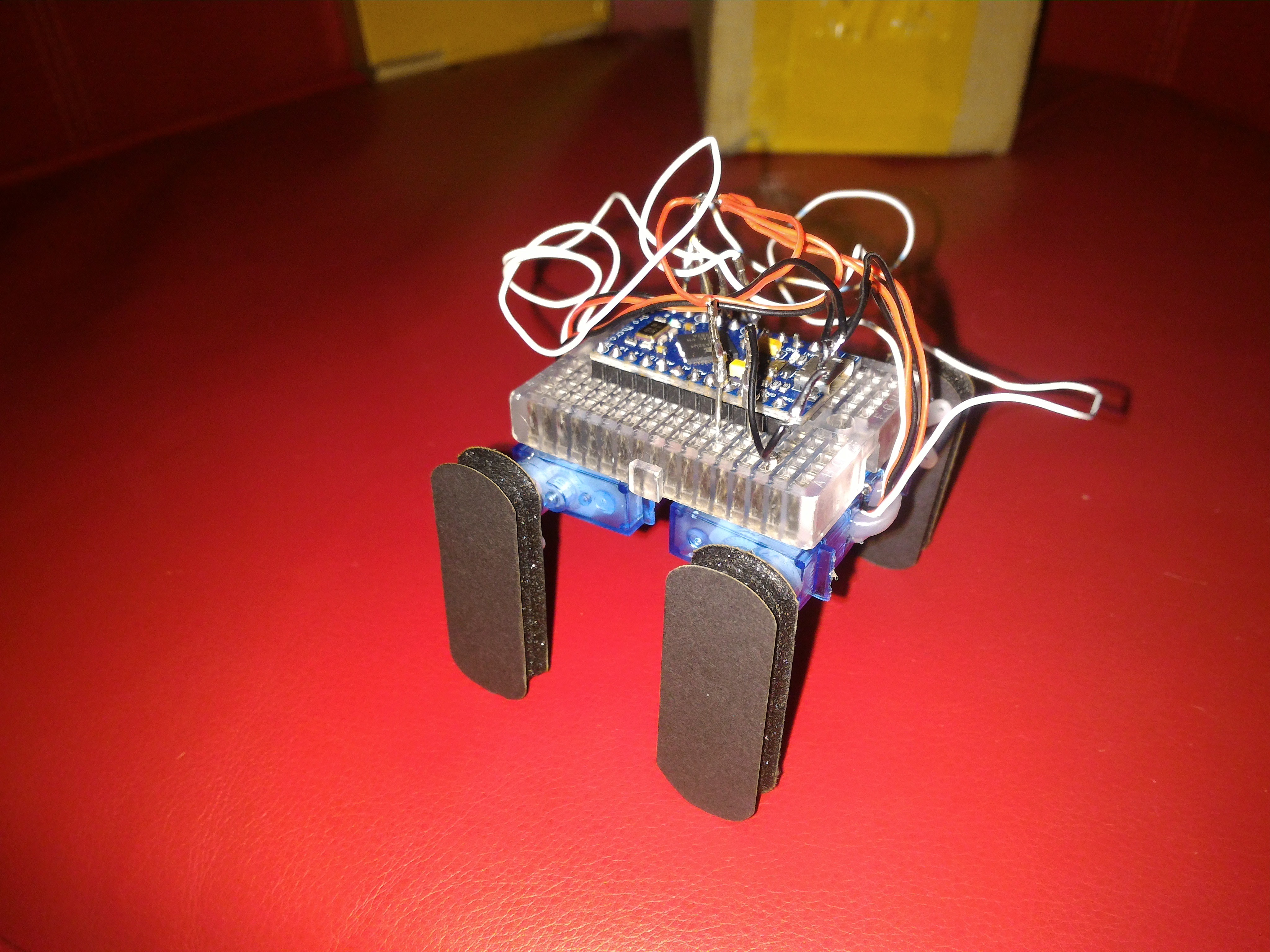
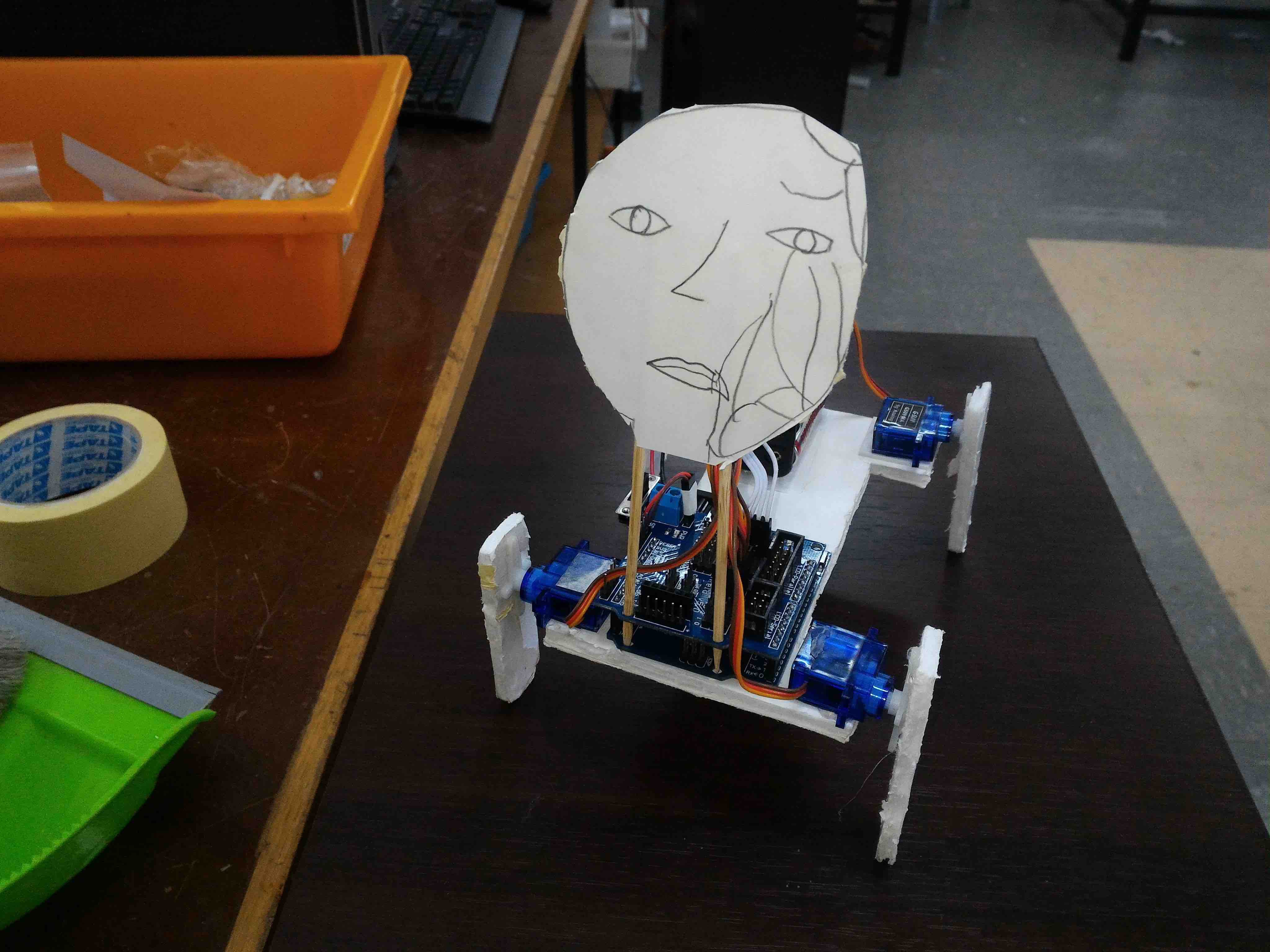
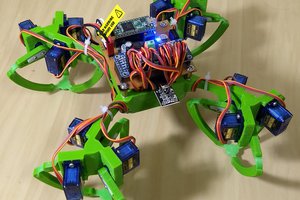
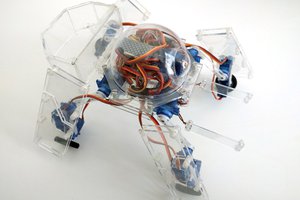
Search for a four servo walking robot
It ran away after a heated discussion about AVR vs Pic.
If you've seen it please tell it I'm so sorry, and that I miss it so much.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Martin Vincent Bloedorn
Martin Vincent Bloedorn
 Ossum
Ossum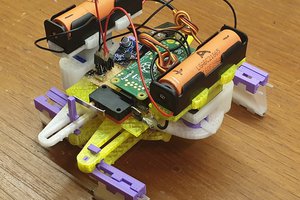
 deʃhipu
deʃhipu
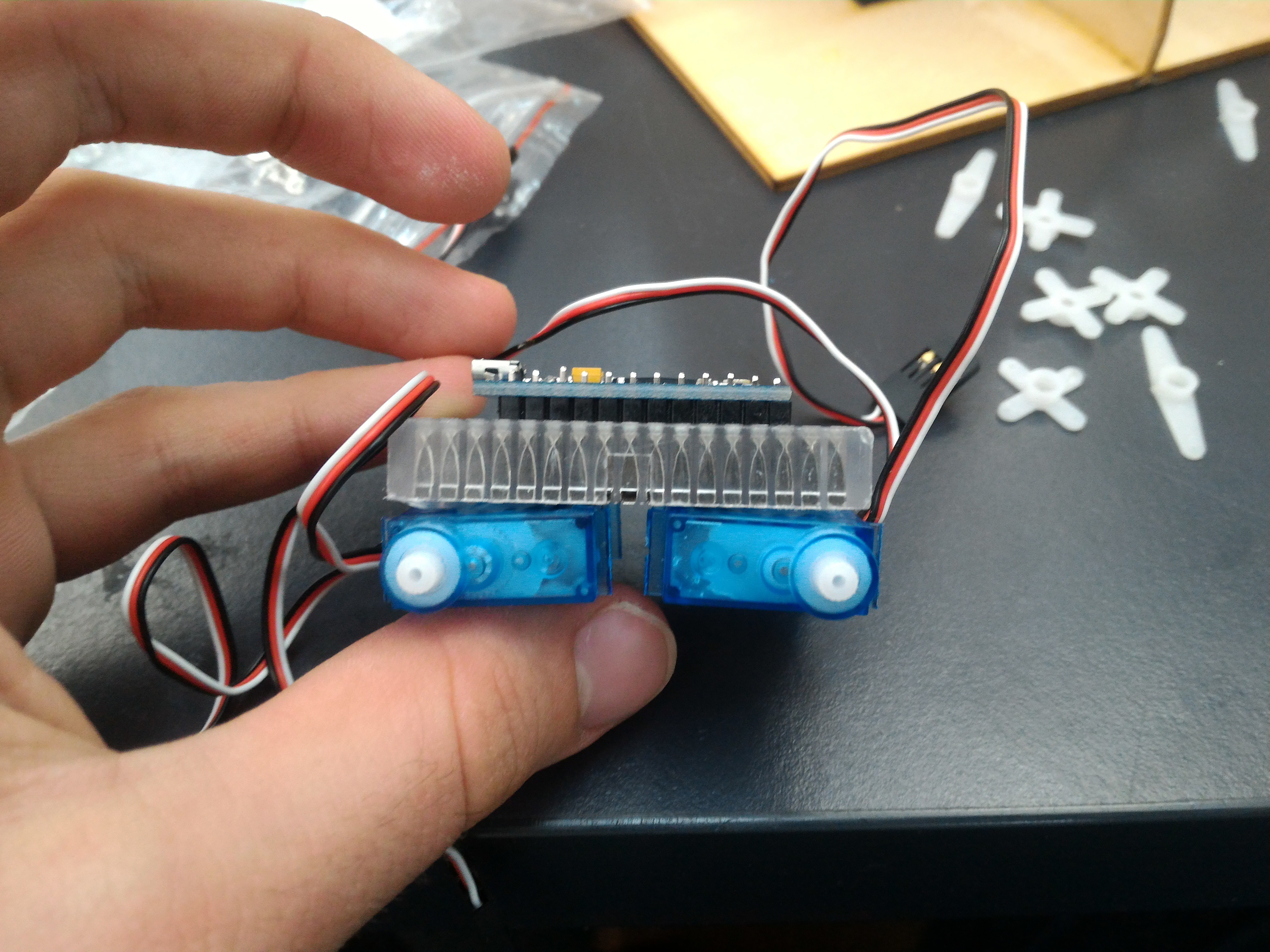
Is it walking yet? I would love to see a video. I like the way you put the motors back to back for the most compact bot possible.