 Jeremy
JeremyOn April 17, 2016 my brother and I launched a high altitude weather balloon over western Massachusetts. The payload contained 3 cameras, multiple GPS trackers, and 2 data recorders. Everything except the data recorders were bought off the shelf.
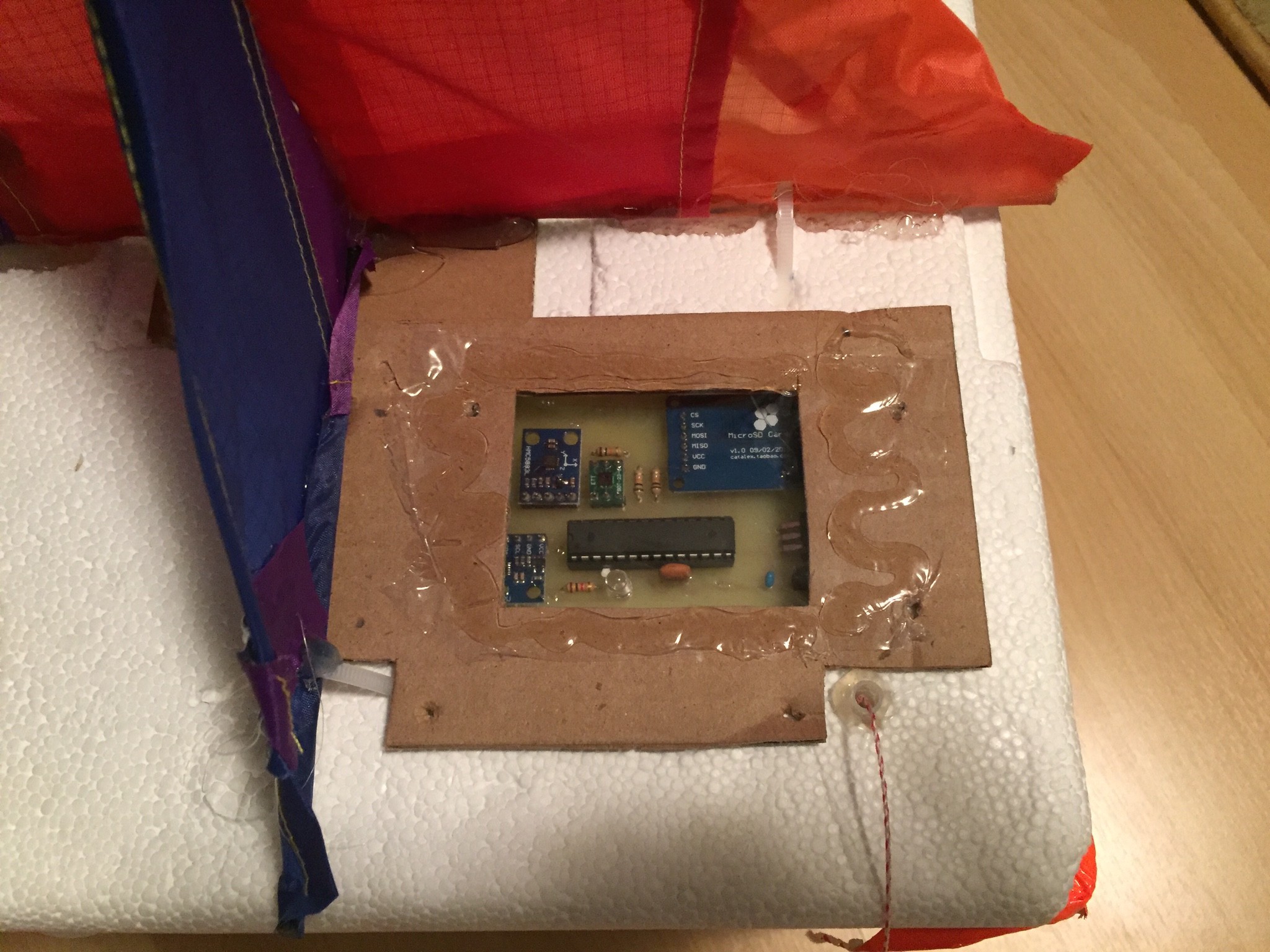
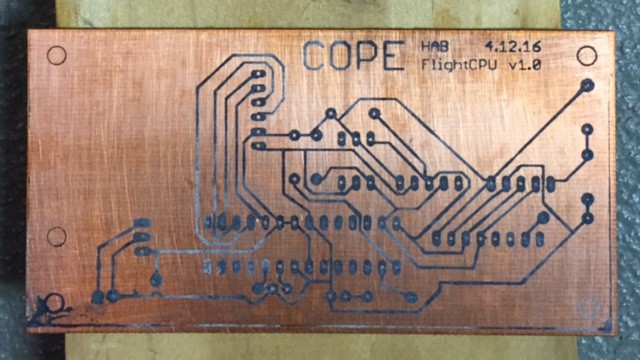
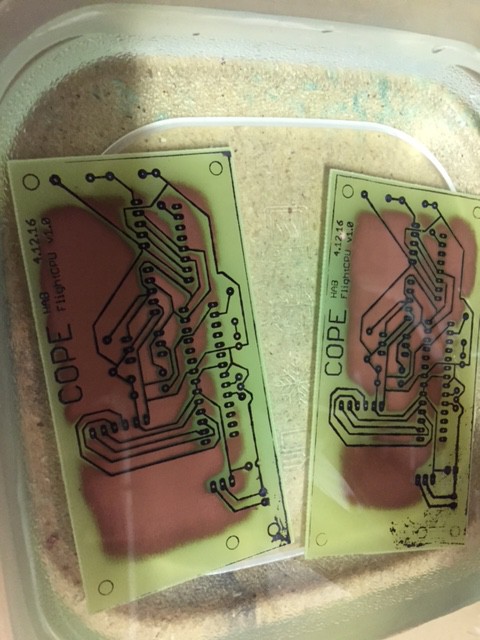
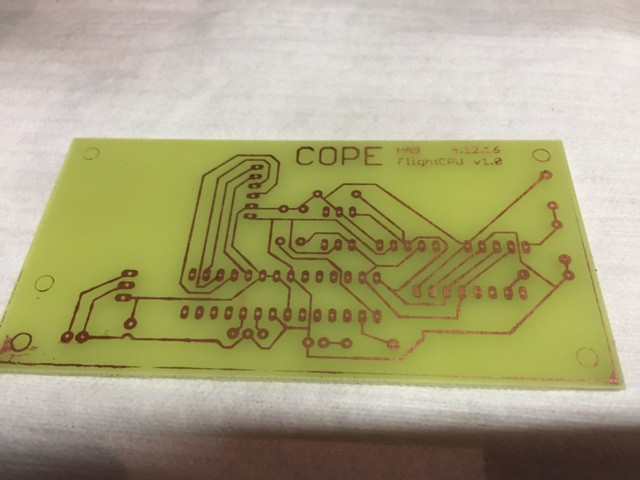
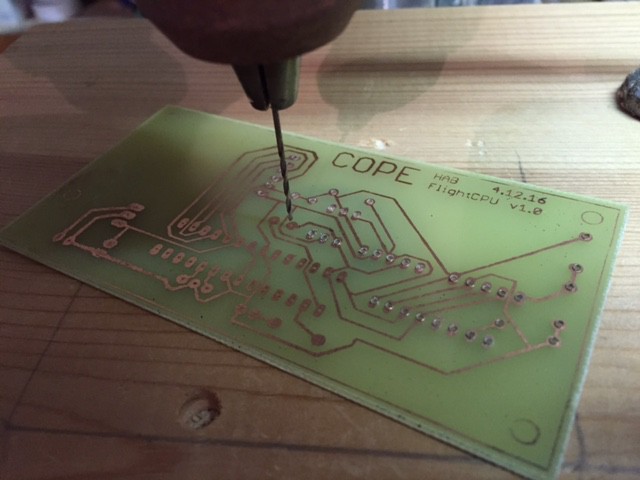
This project documents the build of the FlightCPU used to log data throughout the flight. If you are curious about the entire balloon launch process, we recommend you read through our project summary, uploaded in the document section. This 25 page detailed write-up covers all necessary steps in launching a High Altitude Balloon, from securing the correct components, to best practices in designing your payload and securing the flight train.
Also, be sure to check out the open source files on GitHub!
https://github.com/jcope/FlightCPU
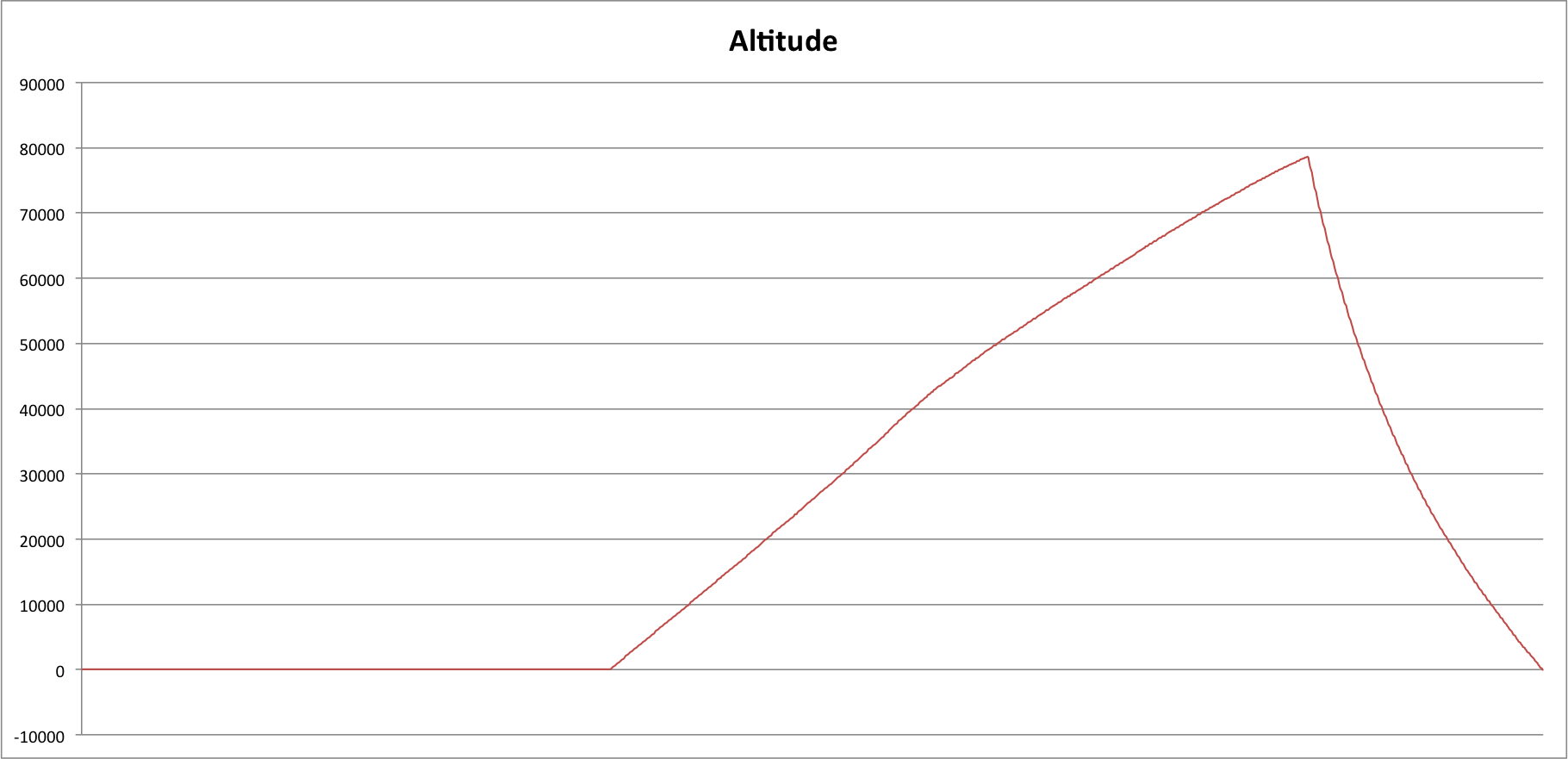
Launching a Hight Altitude Balloon (HAB) is a challenge in of itself. But what good is going to the stratosphere if you can't collect data during the flight? There are plenty of off-the-self data loggers we could have bought to perform the similar tasks, but in order to truly customize our data collection, I needed to build something from scratch.
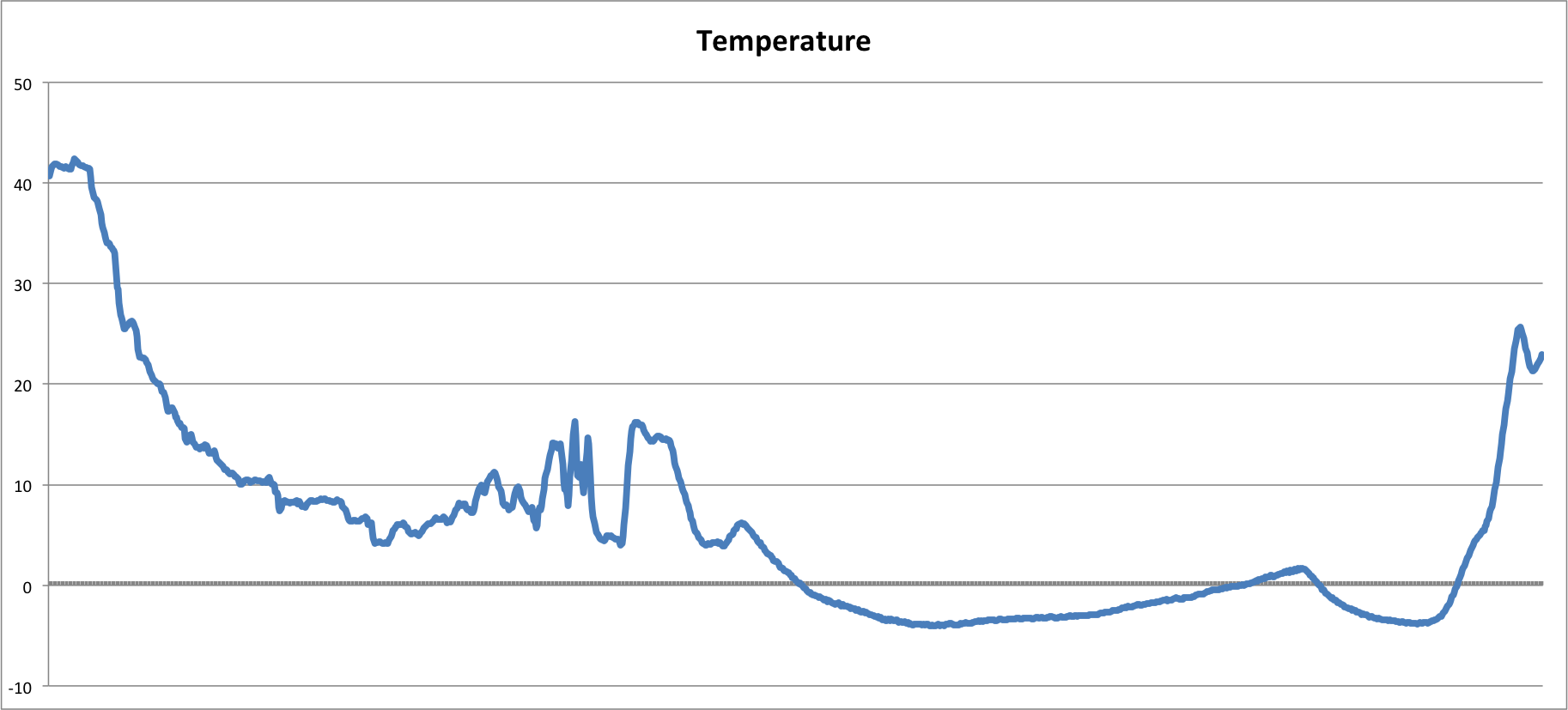
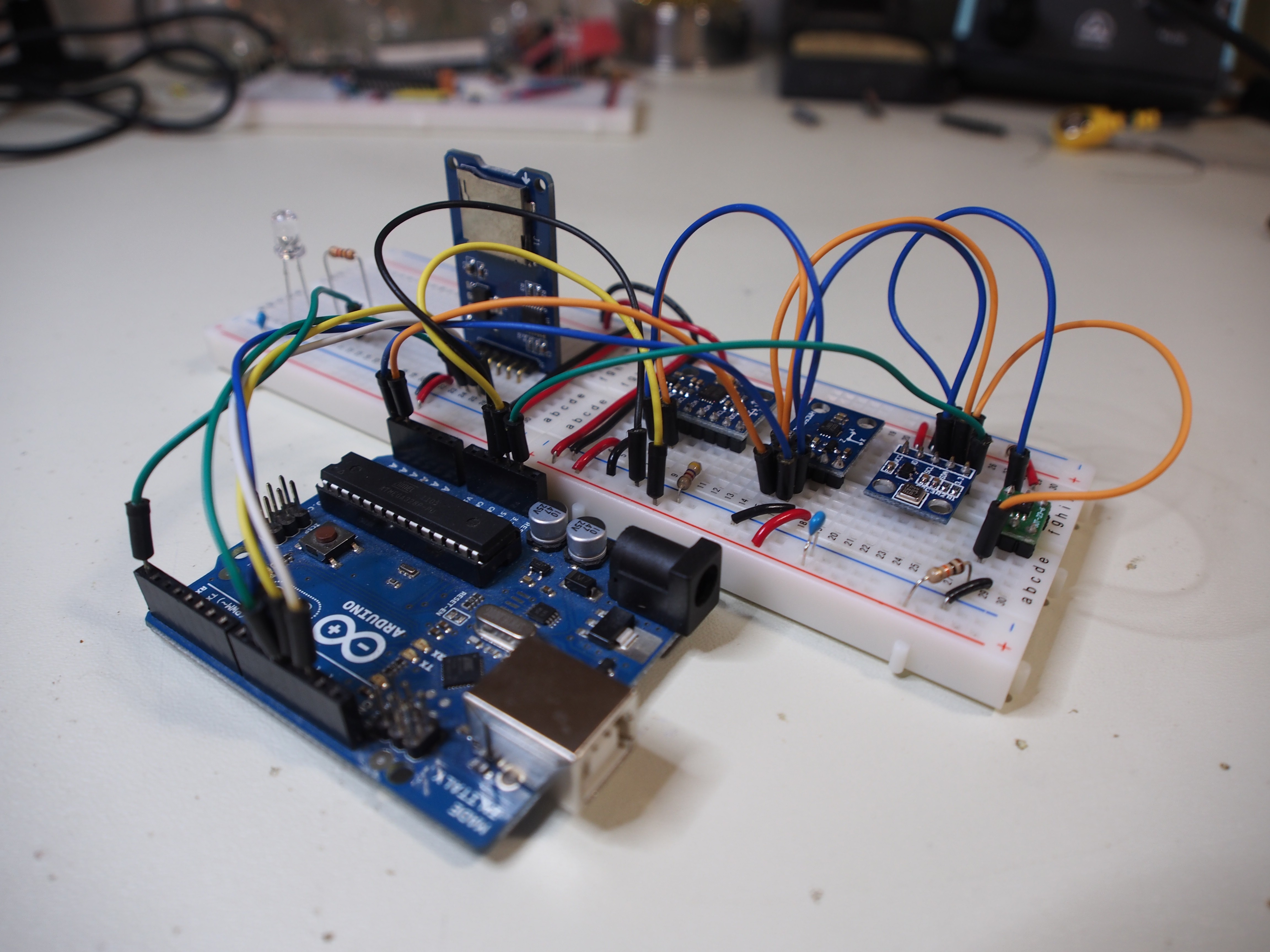
The FlightCPU is uniquely designed in that every sensor was chosen and the software was completely customizable. Because of the customization, we were able to provide separate resolutions for every sensor- a temperature sensor only needs to be updated 1/second while the gyroscope should be read multiple times per second.
The FlightCPU design should enable others to customize their own HAB experience, and take part in the joy of launch and chase!







 rizzo.charlotte
rizzo.charlotte
 Michael Zhang
Michael Zhang
 Radu Motisan
Radu Motisan
 Alfredo L'Homme
Alfredo L'Homme