 dudeskidaddy
dudeskidaddy- 147KV Brushless DC motor
- 2 5200 mAh 6S 20C batteries
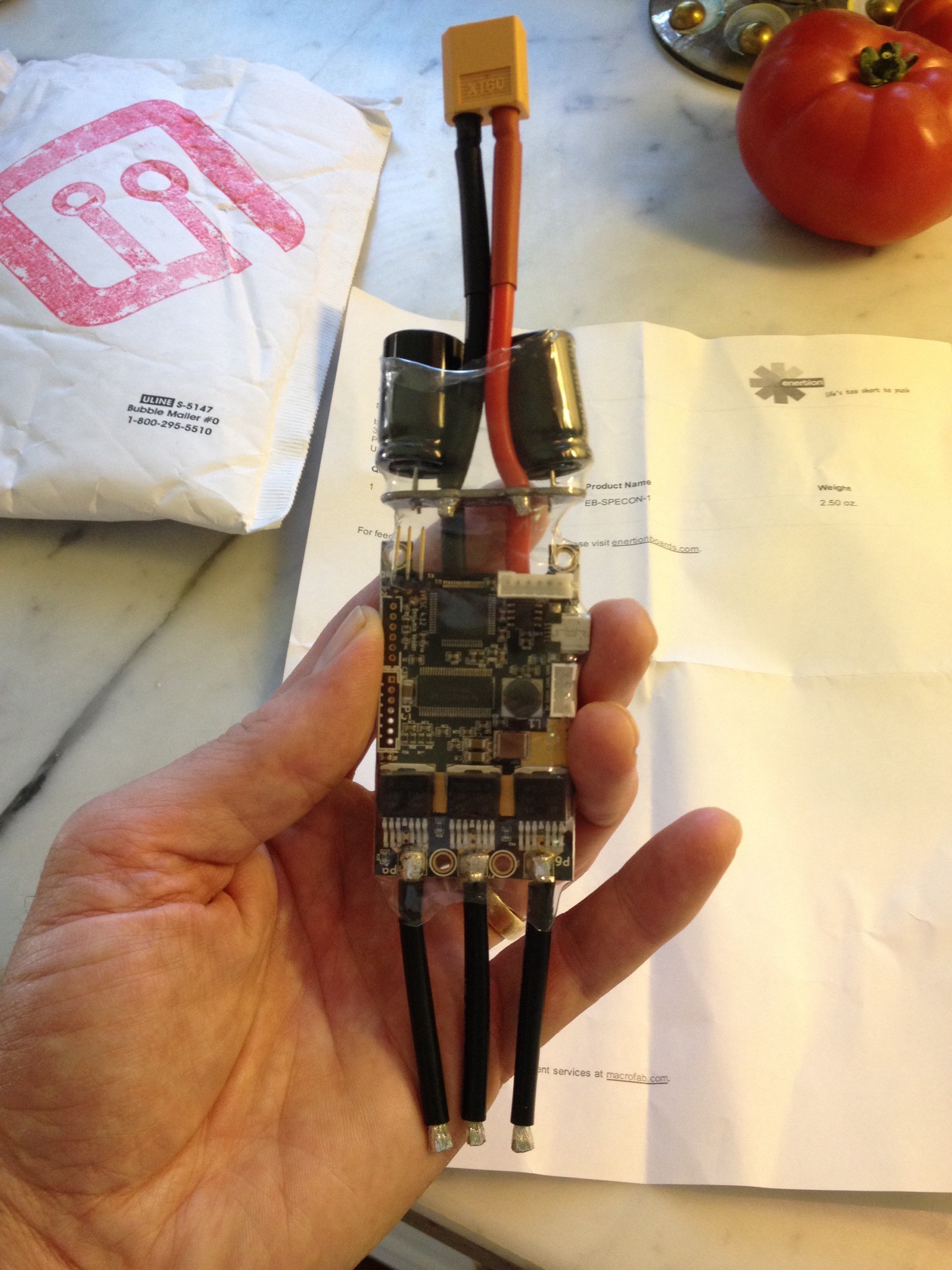
- Turnigy AE-80A Brushless ESC (We're waiting for a VESC on backorder)
- Custom transmitter/receiver: Arduino/Attiny & NRF2401
- IMAX B6 AC balance charger
- Receiver-Side (on board) control logic in hope to increase safety in the event of a loss of transmission...particularly while going down a hill.
- Parts around $400
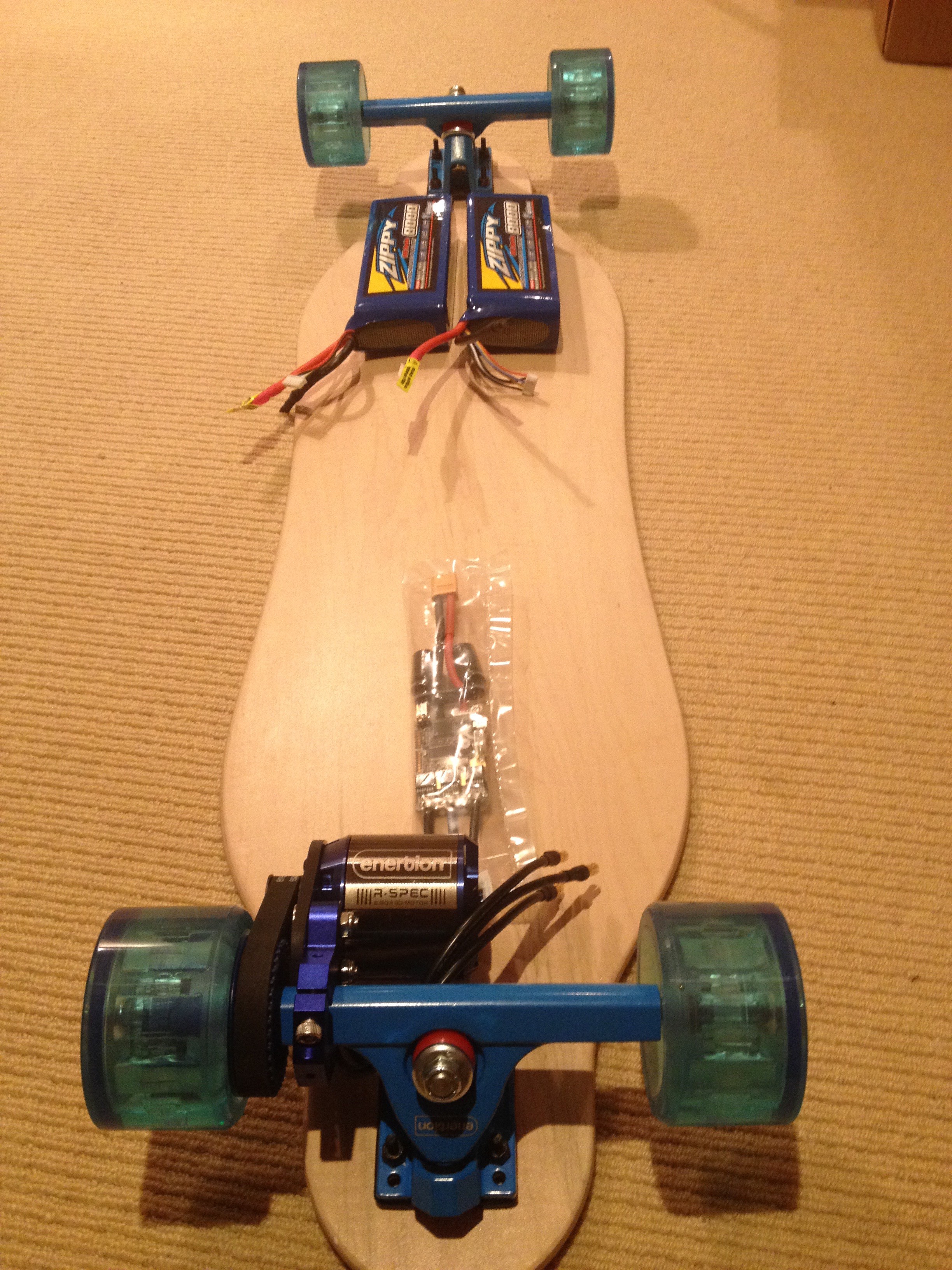
- Using trucks and engine mount from DIY Electric Skateboard
0%
0%
Electric Longboard
Can we build a great board for under $400 in less than 3 weeks?
(using a few pre-made kit parts)
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
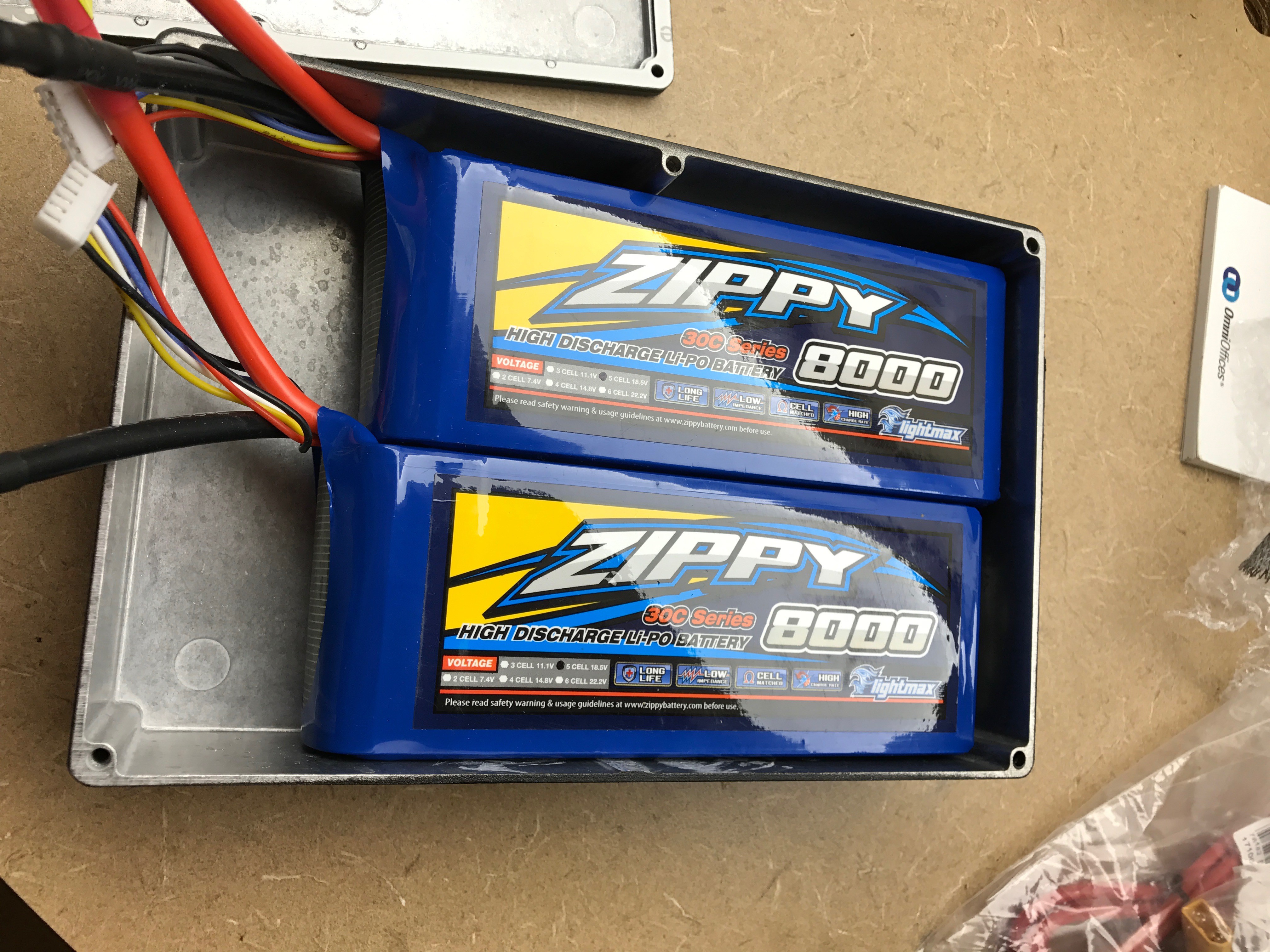
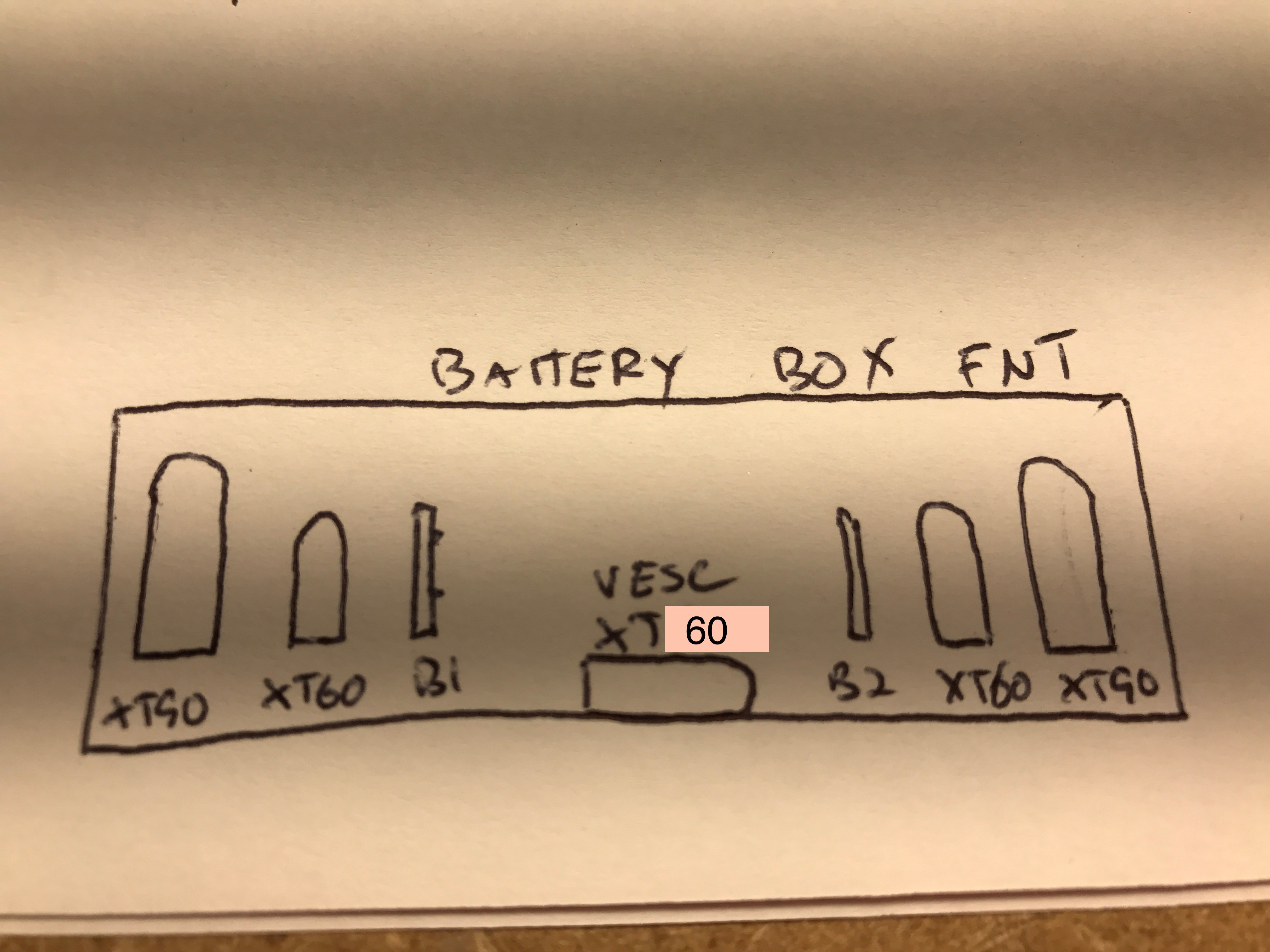 Terminal ports...on the back side of the battery box. This side faces backward on the board. The jumpers would be dangerous if you put one on a charge or output port. But since the jumpers are XT90, they can only be used to connect to the XT90 jumper port and won't fit the others.
Terminal ports...on the back side of the battery box. This side faces backward on the board. The jumpers would be dangerous if you put one on a charge or output port. But since the jumpers are XT90, they can only be used to connect to the XT90 jumper port and won't fit the others. 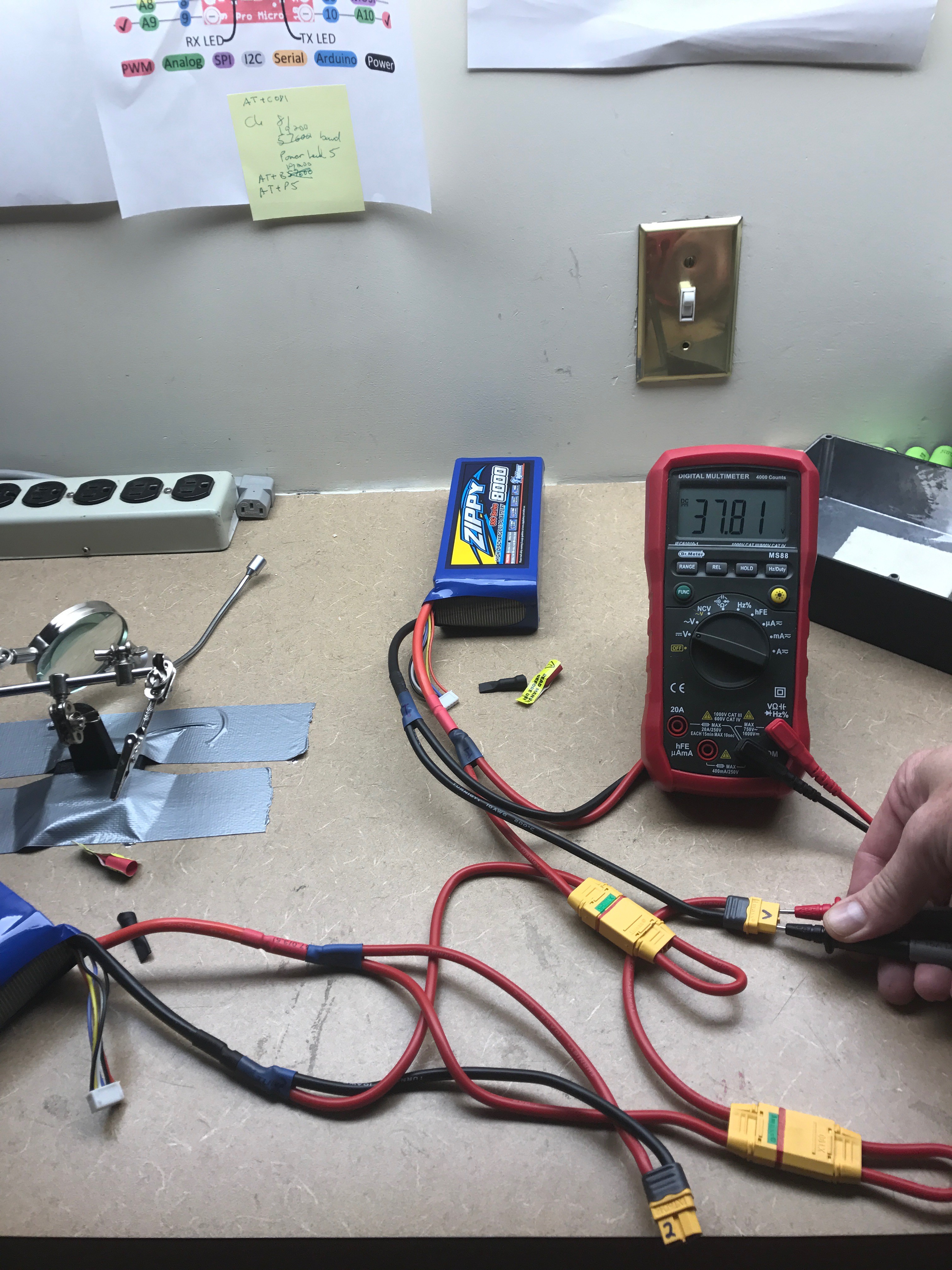 Both 10s batteries ( storage-charged at 50%) showing 37.81V. Note the 2 XT90 Jumpers in place. All this stuff has to fit in the small area in front of the batteries. I could have used shorted wires, but based on past experience I personally think it's easier to fit longer ones. Usually it's getting them to bend the way you need them to is the hardest part...not fitting all that wire..and longer wires are easier to bend. We'll see. I haven't mounted to the box yet and crammed it all in. I think it will fit.
Both 10s batteries ( storage-charged at 50%) showing 37.81V. Note the 2 XT90 Jumpers in place. All this stuff has to fit in the small area in front of the batteries. I could have used shorted wires, but based on past experience I personally think it's easier to fit longer ones. Usually it's getting them to bend the way you need them to is the hardest part...not fitting all that wire..and longer wires are easier to bend. We'll see. I haven't mounted to the box yet and crammed it all in. I think it will fit. 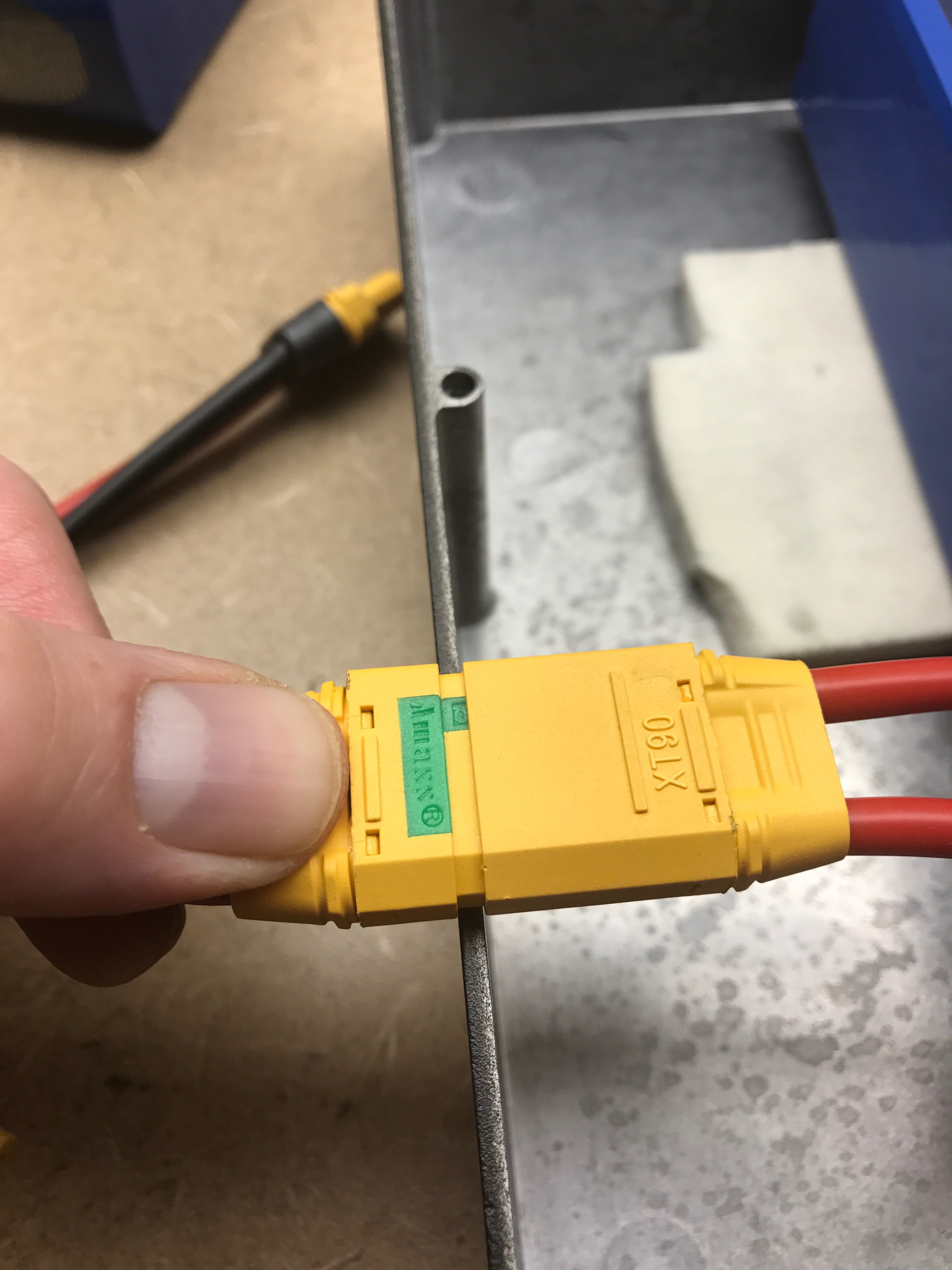





















 mauswerkz
mauswerkz
 Nicholas Stedman
Nicholas Stedman
 Jorj Bauer
Jorj Bauer
 Cees Meijer
Cees Meijer
This post is beneficial as a beginner who buy and start their skateboarding journey.
Longboards are easier to learn the basics, but skateboards are easier to learn tricks with electric board. With the larger wheels and board, longboards have more stability. This requires less balance for the rider, making them ideal for beginner. https://skateinside.com/