 ZeptoBit
ZeptoBitRequirements
My goal is to build a pick and place machine which is practical to use for prototyping and small scale production. I believe there are several factors that are required to achieve this:
- Reliability. The machine must just work, it can not require constant tweaking and maintenance.
- Practical feeders. It needs to hold enough different components to allow all or most of the components required for several different boards to be left on the machine. It can not require all components to be on reels, it must accept loose tape as well as trays and tubes. It must also allow reels to be replaced individually, without needing to take other reels off the machine.
- Practical usability. It must accept the Bill Of Materials from the users CAD software and have a quick way of associating each component with the correct feeder. The machine must be able to place a wide variety of components without operator intervention. This means multiple heads or an automatic tool changer.
- Accuracy. It must be able to place small components, such as DFN or 0201. This means that the machine must have machine vision as well as a rigid structure and a means of precise motion.
- Speed. Finishing each board quickly is essential even for prototypes and very small production runs as a pick and place machine can not realistically be left unattended. For larger runs a slow machine would be a bottle neck.
- Size and noise. The machine must be of a size that can be placed on a table or work bench. It must be practical for two people to move. It must not require 3-phase power or an air compressor. The noise level must be low enough to not disturb neighbors if used in an office or apartment.
- Cost. The machine must be designed for manufacturability. All the components used must be readily available in quantity at an acceptable prize. Manufacturing the machine can not be time consuming or depend on highly skilled people. (No lucky eBay-finds or parts forged from pure unobtainium in the heart of Mount Doom.)
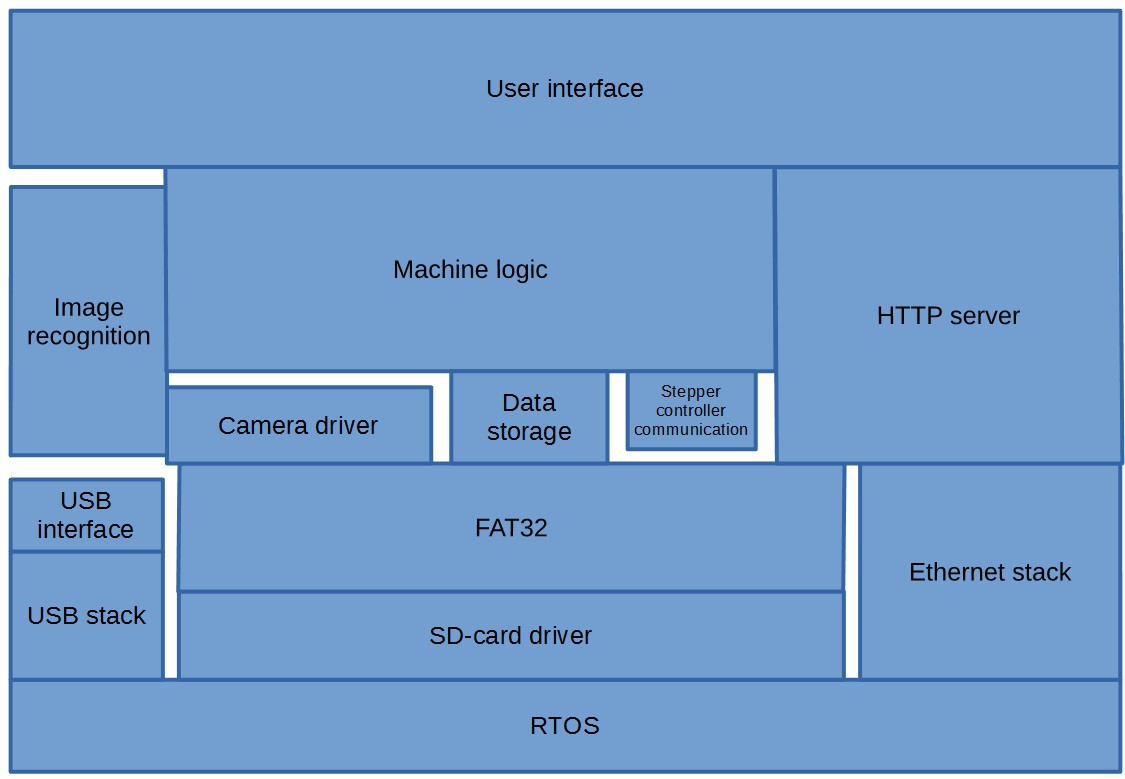 Main MCU layered software diagram.
Main MCU layered software diagram.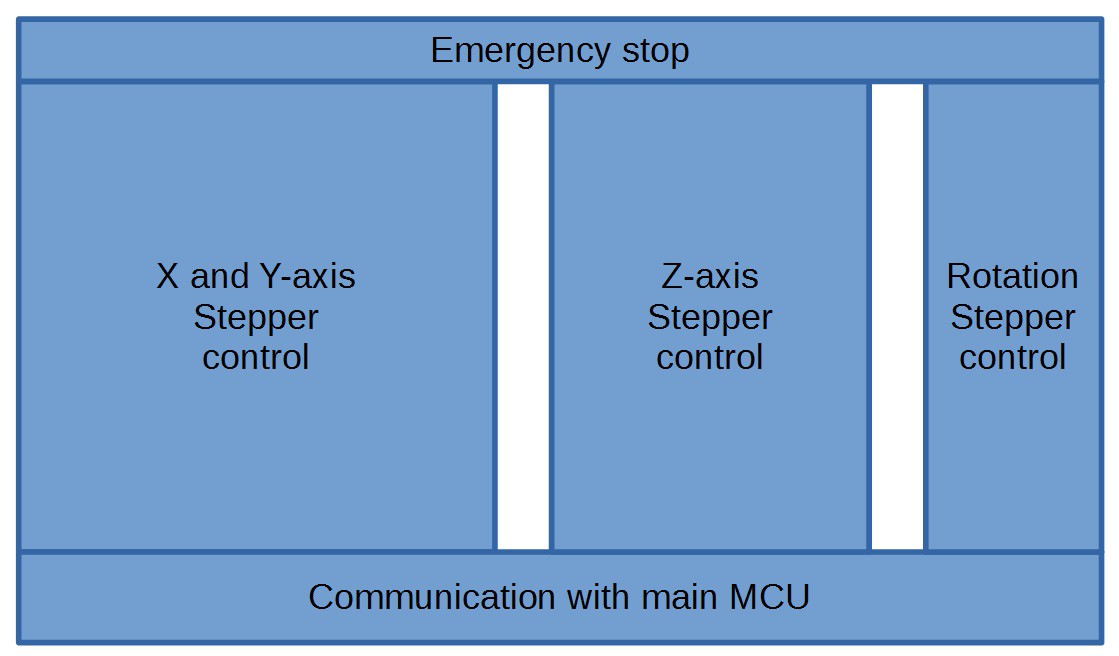 Stepper controller MCU software diagram.
Stepper controller MCU software diagram.










 Thomas Bladykas
Thomas Bladykas
 Daniele Ingrassia
Daniele Ingrassia
 Owen Trueblood
Owen Trueblood
 Alex
Alex
This is a fantastically useful project! Do you have an estimate of at least an order of magnitude cost of parts?